图 5 低线压的 VIN和IIN 波形(VIN = 110V, 负载= 1100W, THD = 2.23%, PF = 0.998)
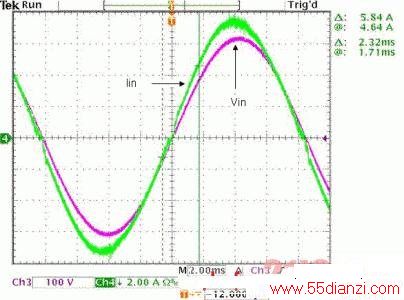
图 6 高线压的VIN和IIN波形(VIN = 220V, 负载= 1100W, THD = 2.27%, PF = 0.996)改善轻负载 PF每个 PFC 在输入端都有一定的电磁干扰 (EMI) 滤波器。
EMI 滤波器的 X 电容器会引起 AC 输入电流引导 AC 电压,从而影响 PF。在轻负载和高线压状态下,这种情况变得更糟糕。PF 很难满足严格的规范。要想增加轻负载的 PF,我们需要相应地强制电流延迟。我们如何实现呢?我们都知道,PFC 电流控制环路不断尝试强制电流匹配其基准。该基准基本上为 AC 电压信号,只是大小不同。因此,如果我们能够延迟电压检测信号,并将延迟后的电压信号用于电流基准生成,便可以让电流延迟来匹配 AC 电压信号,从而使 PF 得到改善。这对一个模拟控制器来说很困难,但对数字控制而言,只需几行代码便可以实现。首先,输入 AC 电压通过 ADC 测量。固件读取经测量的电压信号,增加一些延迟,然后使用延迟后的信号来生成电流基准。图 7-8 显示了基于 1100W 无桥接 PFC 的测试结果。在这种测试中,Vin = 220V,Vout = 360V,而负载 = 108W(约全部负载的 10%)。通道 1 为 Iin,通道 2 为 Vin,通道 4 为带延迟的测量 VIN 信号。图 7 中,经测量的Vin没有增加延迟,PF=0.86,THD=8.8%。图 8 中,测量 Vin 信号被延迟了 300us,PF 改善至 0.90。进一步改善PF是可能的,但付出的代价是 THD,因为进一步延迟电流基准在 AC 电压交叉点产生更多的电流失真。图 9 中,测量 Vin 被延迟了 500us,PF 改善为 0.92。但是,电流在电压交叉点出现失真。结果,THD 变得更糟糕,达到 11.3%。
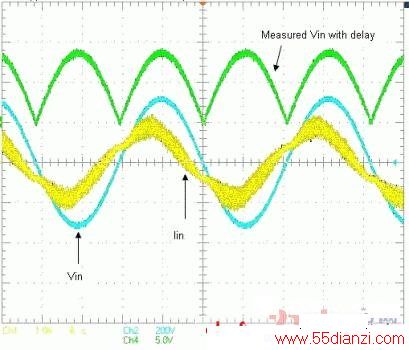
图 7 无测量 VIN 延迟
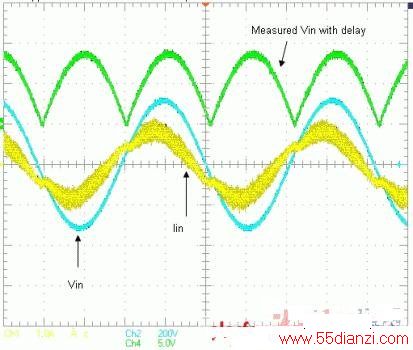
图 8 测量 VIN 延迟 300us。
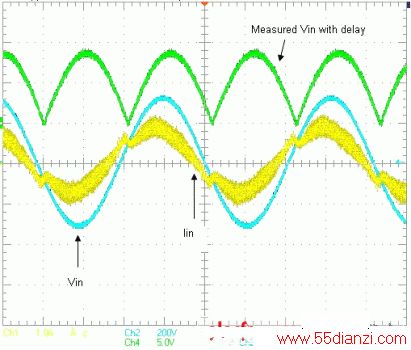
图 9 测量 VIN 延迟 500us。非线性控制相比电流环路,电压环路控制复杂度更低。数字实施时,输出电压 VO 通过一个 ADC 检测,然后同电压基准比较。
我们可以使用一个简单的比例积分 (PI) 控制器来关闭该环路。
方程式 (4)其中,U 为控制输出,Kp 和 Ki 分别为比例项和积分调节增益。E[n] 为 DC 输出电压误差采样。如前所述,使用数字控制的诸多好处之一是它能够实现非线性控制。我们使用非线性 PI 控制的目的便是提高瞬态响应。图 10 显示了非线性 PI 控制的一个实例。误差更大时(通过出现在瞬态下),使用更大的 Kp。误差超出设置限制时这样会加速环路响应,同时恢复时间缩短。使用积分器时,又是另外一种情况。众所周知,积分器用于消除稳态误差。但是,它通常会引起饱和问题,并且其 90 度相位滞后也会影响系统稳定性。正因如此,我们使用了一个非线性积分调节增益[5](图 10)。误差超出一定程度时,积分调节增益Ki减小,以防止出现饱和、过冲和不稳定性等问题。图 10 非线性PI控制数字电压环路控制的另一个优点被称为积分抗饱和。它一般出现在 AC 压降状态下。当 AC 压降出现,并且下游负载继续吸取电流时,DC 输出电压开始下降,但是 PFC 控制环路仍然尝试调节其输出。因此,积分器积聚,并可能出现饱和,这种情况被称为积分器饱和。一旦AC恢复,饱和积分器便可能会引起 DC 输出电压过冲。若想防止出现这种情况,则一旦探测到 AC 恢复,固件就重设积分器,同时 DC 输出达到其调节点。数字控制器还可以做得更多,例如:频率抖动、系统监控、通信等,并且可以为无桥接 PFC提供灵活的控制、更高的集成度以及更高的性能。在一些高端的 AC/DC 设计中,现在越来越多的设计正在使用数字控制器。






