其中,gm 是跨导误差放大器的增益。Zith(s) 是放大器输出 ITH 引脚上补偿网络的阻抗。
从图 21 所示的控制方框图中可以看出,电压环路调节误差可由以下等式量化:
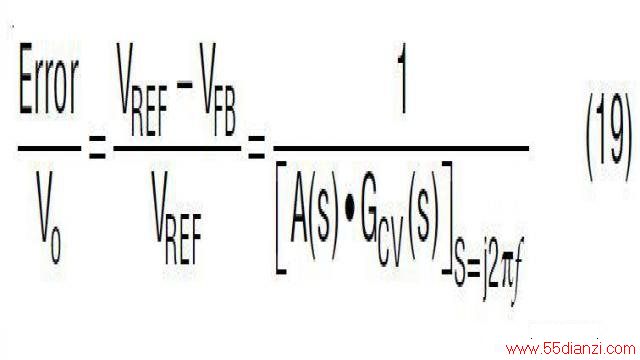
因此,为了最大限度降低 DC 调节误差,大的 DC 增益 A(s) 是非常想要的。为了最大限度提高 DC 增益 A(s),首先要将电容器 Cth 放在放大器输出 ITH 引脚处以形成一个积分器。在这种情况下,A(s) 传输增益为:
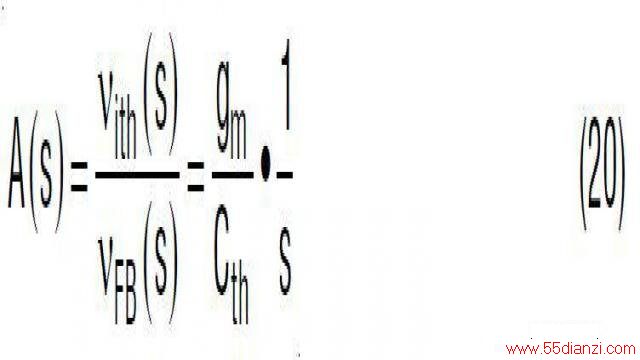
图 23 显示了 A(s) 的原理图及其波德图。如图所示,电容器 Cth 以无限高的 DC增益在 A(s) 中产生了一个积分项。不幸的是,除了初始的 –180° 负反馈,Cth 又增加了 –90° 的相位滞后。将一阶系统功率级 GCV(s) 的 –90° 相位包括进来以后,在交叉频率 fC 处的总体电压环路相位接近 –360°,该环路接近不稳定状态。
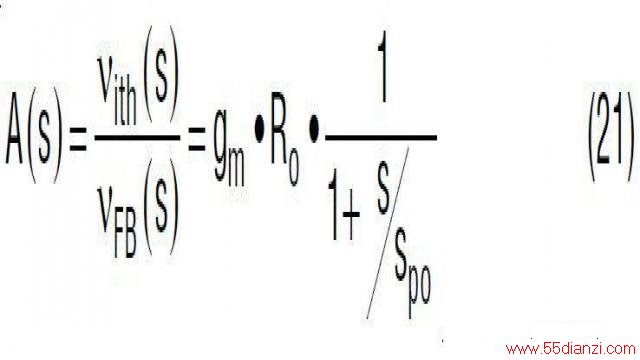
实际上,电流源 gm 放大器的输出阻抗不是一个无限大的值。在图 24 中,Ro 是 gm 放大器 ITH 引脚的内部输出阻抗。凌力尔特公司控制器的 Ro 通常较高,在 500kΩ 至 1MΩ 范围。因此,单个电容器的 A(s) 转移函数变成了等式 21。该转移函数有一个低频极点 fpo (由 RO · Cth 决定)。因此 A(s) 的 DC 增益实际上是 gm · RO。如图 24 所示,在预期的交叉频率 fc_exp 处,A(s) 仍然有 –90° 的相位滞后。
其中
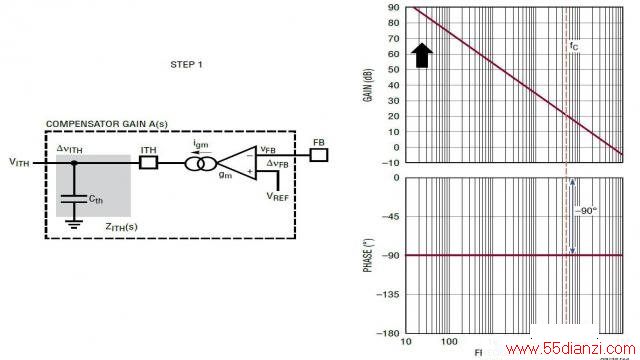
图 23:步骤 1:简单的电容器补偿网络 A(s) 及其波德图
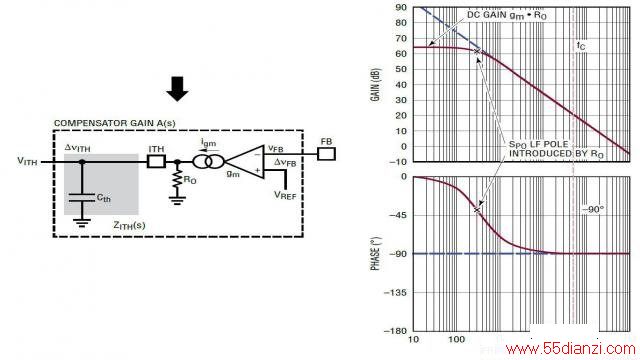
图 24:包括 gm 放大器输出阻抗 RO 的单极点 A(s)
为了提高 fC 处的相位,增加一个与 Cth 串联的电阻器 Rth 以产生一个零点,如等式 23 和图 25 所示。该零点贡献高至 +90° 超前相位。如图 25 所示,如果零点 sthz 放置在交叉频率 fC 之前,那么 A(s) 在 fC 处的相位可以显着地增大。因此,这样做提高了电压环路的相位裕度。
上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] 下一页
本文关键字:开关电源 稳压-电源电路,单元电路 - 稳压-电源电路
上一篇:单相PWM变换器传导EMI的抑制






