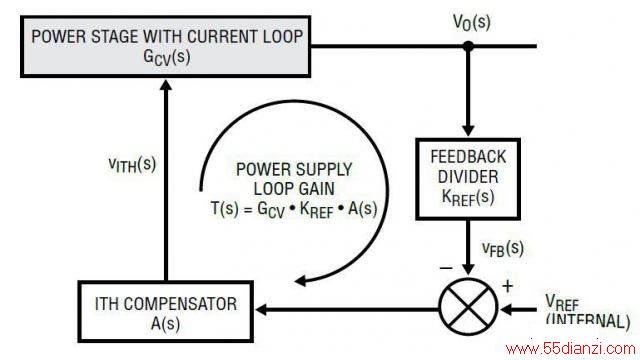
图 21:反馈环路设计的控制方框图
总之,闭合电压环路 T(s) 的性能由两个重要参数决定:环路带宽和环路稳定性裕度。环路带宽由交叉频率 fC 量化,在这一频点上,环路增益 T(s) 等于1 (0dB)。环路稳定性裕度一般由相位裕度或增益裕度量化。环路相位裕度 ![]() 的定义是在交叉频率点上总体 T(s) 相位延迟和 –180° 之差。通常需要 45° 或 60° 最小相位裕度以确保稳定性。对于电流模式控制而言,为了衰减电流环路中的开关噪声,环路增益裕度定义为在 ½ • fSW 处的衰减。一般而言,希望在 ½ • fSW 处有最小 8dB 衰减 (-8dB 环路增益)。
的定义是在交叉频率点上总体 T(s) 相位延迟和 –180° 之差。通常需要 45° 或 60° 最小相位裕度以确保稳定性。对于电流模式控制而言,为了衰减电流环路中的开关噪声,环路增益裕度定义为在 ½ • fSW 处的衰减。一般而言,希望在 ½ • fSW 处有最小 8dB 衰减 (-8dB 环路增益)。
选择想要的电压环路交叉频率 fC
更大的带宽有助于实现更快的瞬态响应。不过,增大带宽通常会降低稳定性裕度,使控制环路对开关噪声更加敏感。一个最佳设计通常在带宽 (瞬态响应) 和稳定性裕度之间实现了良好的平衡。实际上,电流模式控制还通过在 1/2 • fSW 处电流信号的采样效应 [3],而引入了一对双极点 ![]() 。这些双极点在 ½ • fSW 附近引入了不想要的相位延迟。一般而言,要获得充足的相位裕度并充分衰减 PCB 噪声,交叉频率就要选为低于相位开关频率 fSW 的 1/10 至 1/6。
。这些双极点在 ½ • fSW 附近引入了不想要的相位延迟。一般而言,要获得充足的相位裕度并充分衰减 PCB 噪声,交叉频率就要选为低于相位开关频率 fSW 的 1/10 至 1/6。

用 R1、R2、C1 和 C2 设计反馈分压器网络 Kref(s)
在图 16 中,DC 增益 KREF 的 Kref(s) 是内部基准电压 VREF 和想要的 DC 输出电压 Vo 之比。电阻器 R1 和 R2 用来设定想要的输出 DC 电压。
其中
可以增加可选电容器 C2,以改进反馈环路的动态响应。从概念上来说,在高频时,C2 为输出 AC 电压信号提供低阻抗前馈通路,因此,加速了瞬态响应。但是 C2 还有可能给控制环路带来不想要的开关噪声。因此,可以增加一个可选 C1 滤波器电容器,以衰减开关噪声。如等式 11 所示,包括 C1 和 C2 的总体电阻器分压器转移函数 KREF(s) 有一个零点和一个极点。图 22 显示了 KREF(s) 的波德图。通过设计成 fz_ref < FP_ref,C1 和 C2 与 R1 和 R2 一起,导致在以 fCENTER 为中心的频带中相位增大,相位增大量在等式 14 中给出。如果 fCENTER 放置在目标交叉频率 fC 处,那么 Kref(s) 使相位超前于电压环路,提高了相位裕度。另一方面,图 22 还显示,C1 和 C2 提高了高频时的分压器增益。这种情况是不想要的,因为高频增益提高使控制环路对开关噪声更加敏感。C1 和 C2 导致的高频增益提高在等式 15 中给出。
上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] 下一页
本文关键字:开关电源 稳压-电源电路,单元电路 - 稳压-电源电路
上一篇:单相PWM变换器传导EMI的抑制






