矢量控制理论于 1971 年由德国西门子公司的 F.Blaschke 提出。矢量控制的基本思想是将电机的三相电流经坐标变换变成以转子磁场定向的两相旋转坐标系下,从而可以像直流电机那样进行扭矩控制。矢量控制系统可在全速度范围内实现电机电流的良好响应、控制效率高、调节器的设计比较容易实现、速度的调节范围宽、具有良好的带载起动性能。因此,矢量控制方案是PMSM 控制系统的首选方案。矢量控制算法的控制框图如图 2-1 所示:
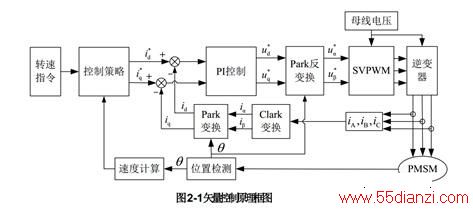
矢量控制的实现步骤如下:
1. 测量三相定子电流。可以只测量两相电流,如
,第三相可以根据三相电流和为零得到,即
;
2. 检测转子位置和转速,在无传感器系统中使用 SMO 方法进行估计;
3. 将三相电流由三相静止 ABC 坐标系变换到两相静止αβ 坐标系,得到
;
4. 将
由两相静止αβ 坐标系变换到两相旋转dq坐标系,得到
。稳态情况下
为常值;
5. 根据转速指令和电机真实转速进行 PI 运算,得到与扭矩控制直接相关的q 轴电流命令值
。采用
控制方式时
;
6. 根据dq轴电流的命令值和真实反馈值,得到相应的误差电流,从而进行电流环 PI 运算,输出结果为期望施加到电机上的电压矢量
和
;
7. 将旋转坐标系下的电压矢量
和
通过逆变换得到两相静止αβ 坐标系下的电压命令
;
8. 根据
进行 SVPWM 调制,计算出新的 PWM 占空比,从而控制逆变器输出期望的电压矢量。
下面详细介绍各步骤的实现方法。
2.1 坐标变换
矢量控制的基础是通过坐标变换将三相交流量变换到两相直流量,从而可以使用经典的 PI 控制器加以控制。矢量控制中存在的坐标系主要包括:三相绕组对应的三相静止 ABC 坐标系;两相静止αβ 坐标系;两相旋转dq坐标系。各坐标系的示意图如图 2-2 所示:
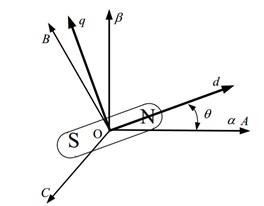
图2-2 矢量控制中的 3种坐标系
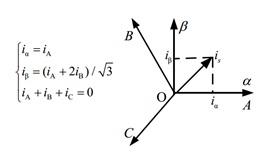
2.1.1 Clark 变换
经 AD 测量得到的 3 相电流理论上是幅值相等、相位互差 120°的交流量,可以使用 Clark 变换将其变换到两相静止坐标系下。根据三相电流和为零可知,只需测量两相电流即可完成此变换。Clark 变换公式如下:
2.1.2 Park 变换
经过 Clark 变换后的电流信号仍然是交流量,不利于控制。因此使用 Park 变换将其变换到两相旋转坐标系下。进过 Park 变换后的电流信号变成了直流量。Park 变换公式如下:
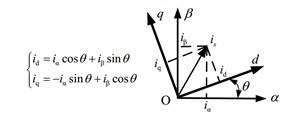
式中θ 为当前转子位置。
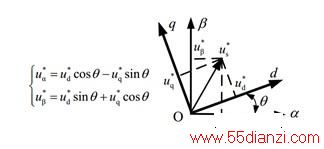
2.1.3 Park 逆变换
PI 调节器输出的电压 经过 Park 逆变换后才能得到 ,从而便于矢量调制。Park逆变换公式如下:
2.2 PI 控制器
PI 控制器用于对闭环控制中被控对象的误差进行调节,输出相应的控制量,以实现反馈值跟踪命令值,从而得到期望的系统响应。PI 控制器结构简单,易于数字化实现,因此被广泛的应用于闭环控制系统中。
本文所设计到的电机控制系统中共存在 3 个相同结构的 PI 调节器,分别用于控制电机转速、d 轴电流和q 轴电流。相应的 PI 控制器结构框图如图 2-3 所示:
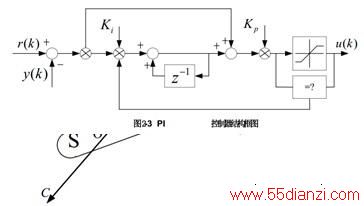
1) PI 控制器的比例增益Kp主要用于调节系统响应的快速性, Kp越大系统对误差的响应越灵敏。但是过大的 Kp值会造成系统响应超调、稳态抖动等现象。






