传统的步进控制器线路复杂,成本高。本文设计的系统采用单片机控制步进电机,充分利用了单片机强大的运算能力和可编程的特点,可以实现较为复杂的步进电机控制功能。使系统具有线路简单、成本低的特点,可靠性大大增加,对复杂繁琐的控制变得易于实现。该系统采用AT89C2051单片机,作为步进电机控制器的核心运算器件控制步进电机。工作原理步进电机依其构造上的差异可分为三大类:
1、可变磁阻式(VR型):可变磁阻式电机又称反应式步进电机,一般为三相。可变磁阻式步进电机的转子磁路由软磁材料加工成齿状,定子上有多相励磁绕组,利用磁导的变化产生转矩,当定子线圈不加激磁电压时,保持转矩为零,故其转子惯性小、响应性佳。但其容许负荷惯性并不大,噪声和振动都很大。其步进角通常为150,如图(a)所示。
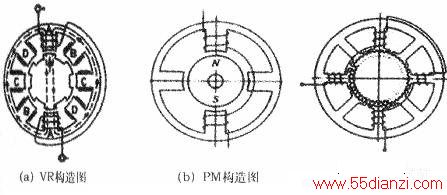
2、永久磁铁式(PM型):永久磁铁式步进电机的转子由永久磁铁构成,其磁化方向为辐向磁化,无激磁时有保持转矩。依转子材质区分,其步进角有450、900及7.50、11.250、150、18。等几种。一般为两相,转矩和体积较小,如图(b)所示。
3、混和式(HB型).混合式步进电机的转子由轴向磁化的磁铁制成,磁极做成复极的形式,它混合了可变磁阻式步进电机及永久磁铁式步进电机的优点,精确度高、转矩大、步进角度小。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度,四相步进电机就是其中一种,其图(c)所示。当有一相绕组被激励时,磁通从正相齿,经过软铁芯的转子,并以最短的路径流向负相齿,而其他六个凸齿并无磁通。为使磁通路径最短,在磁场力的作用下,转子被强迫移动,使最近的一对齿与被激励的一相对准。
如图(a),当A相控制绕组接通脉冲电流时,在磁拉力作用下使A相的定、转子对齐,相邻的B相和D相的定、转子小齿错开。从这个位置再对B相进行激励,则磁拉力使B相转子向反时针转过15。,定、转子小齿对齐(转过),而与B相相邻的C相和A相的定、转子小齿又错开,即步进电机转过一个步距角。若是D相被激励,转子为顺时针转过15。。下一步是C相被激励,因为C相有两种可能性:A-B-C-D或A-D-C-B。一种为反时针转动;另一种为顺时针转动。但每步都使转子转动15。。
若按A—B—C—D—A…规律循环顺序通电,则步进电机按一定方向转动:若改变通电顺序为A—D—C—B—A,则电机反向转动,这种控制方式称为四相单四拍。若按AB—BC—CD—DA—AB或A-AB—B—BC—C—CD—D—DA—A顺序通电则称为四相双拍或四相单、双八拍。无论采用哪种控制方式,在一个通电循环内,步进电机的转角恒为一个齿距角。所以,可以通过改变步进电机通电循环次序来改变转动方向,可以通过改变通电频率来改变其角频率。运用单片机的输出功能,通过编程实现输出四个信号分别给步进电机的四相A、B、C、D,并通过输出时信号的循环次序,来设定步进电机的转动方向及输出信号的频率以便设定步进电机的转动频率。
主要电路设计及分析
系统原理图设计该步进电机控制系统由单片机、驱动电路、步进电机等组成。系统所用的步进电机为四相步进电机,其工作电压+12V。单片机采用AT89C2051,并配以显示(指示)电路、按键电路、驱动电路、复位电路等。系统方框图如下图所示:

电路工作原理由AT89C2051产生脉冲信号,分别由P1.7、P3.4、P3.5、P3.7四个端口输出,信号经过74LS04反相器和达林顿管ULN2803放大,接入步进电机各相;P1.0、P1.1、P1.2、P1.3作为译码器CD4511的输入电路,用于控制数码管的显示:其中P1,4、P1.5、P1.6是显示动态扫描位选线和键盘扫描输出线;同时电路还包括晶体振荡电路和系统的复位电路。
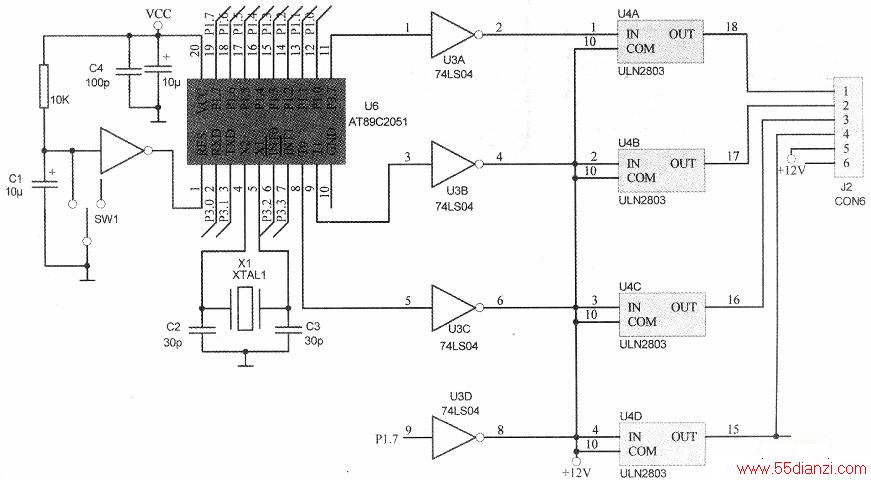
脉冲输出电路步进电机与单片机的接口电路如上图,由于步进电机的驱动电流比较大,故步进电机与单片机的连接都需要专门的接口电路和驱动电路。接口电路可以是单片机内部的I/O接口,也可以是可编程接口芯片,如8255、8155等。本系统采用AT89C2051单片机1/0端口直接输出步进电机控制脉冲的方法,在端口资源足够的情况下这样做省略外部脉冲分配电路。
控制脉冲输出口为P3.4、P3.5、P3.7、P1.7,控制脉冲低电平有效。采用低电平输出的原因是因为AT89C2051的低电平驱动能力(mA级)远远大于高电平输出的驱动能力(μA级)。通过一个接口接步进电机驱动电路。
当单片机的接口(如P1.7)输出为0时,经反相驱动器后变为高电平,使达林顿管导通,则相应的步进电机相绕组通电。反之,当其为1时,相应的相不通电。只要按照一定的顺序改变P1.7、P3.7、P3.5、P3.4通电的顺序,就可控制步进电机按一定的方向步进。
其中的达林顿管ULN2803管脚图如下图:

NPN达林顿连接晶体管是低逻辑电平数字电路(如TTL、CMOS、PMOS/NMOS)和大电流高电压要求的其它类似负载间的接口的理想器件,器件有集电极开路输出和用于瞬变抑制的续流二极管。
LED显示电路由于设计中用一块单片机进行控制,资源有限,选择了采用七段LED显示部分采用BCD-锁存/七段译码/驱动器CD4511进行译码和驱动,其功能是输入BCD码,输出7段显示器的字型码。其中A、B、C、D为BCD码输入端,abcdefg为显示段输出端,如下图所示。
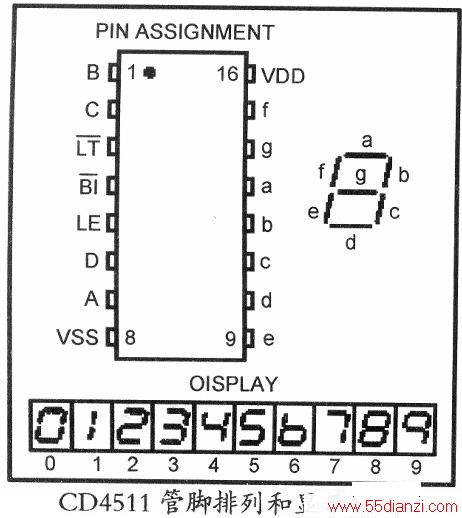
有关引脚说明如下:LT:测试输入端,为低电平时,与输入无关,使各段全亮。BI:灭灯输入端,为低电平时,各段全灭oLE:锁存允许端,为高电平时,锁存输入的BCD码。
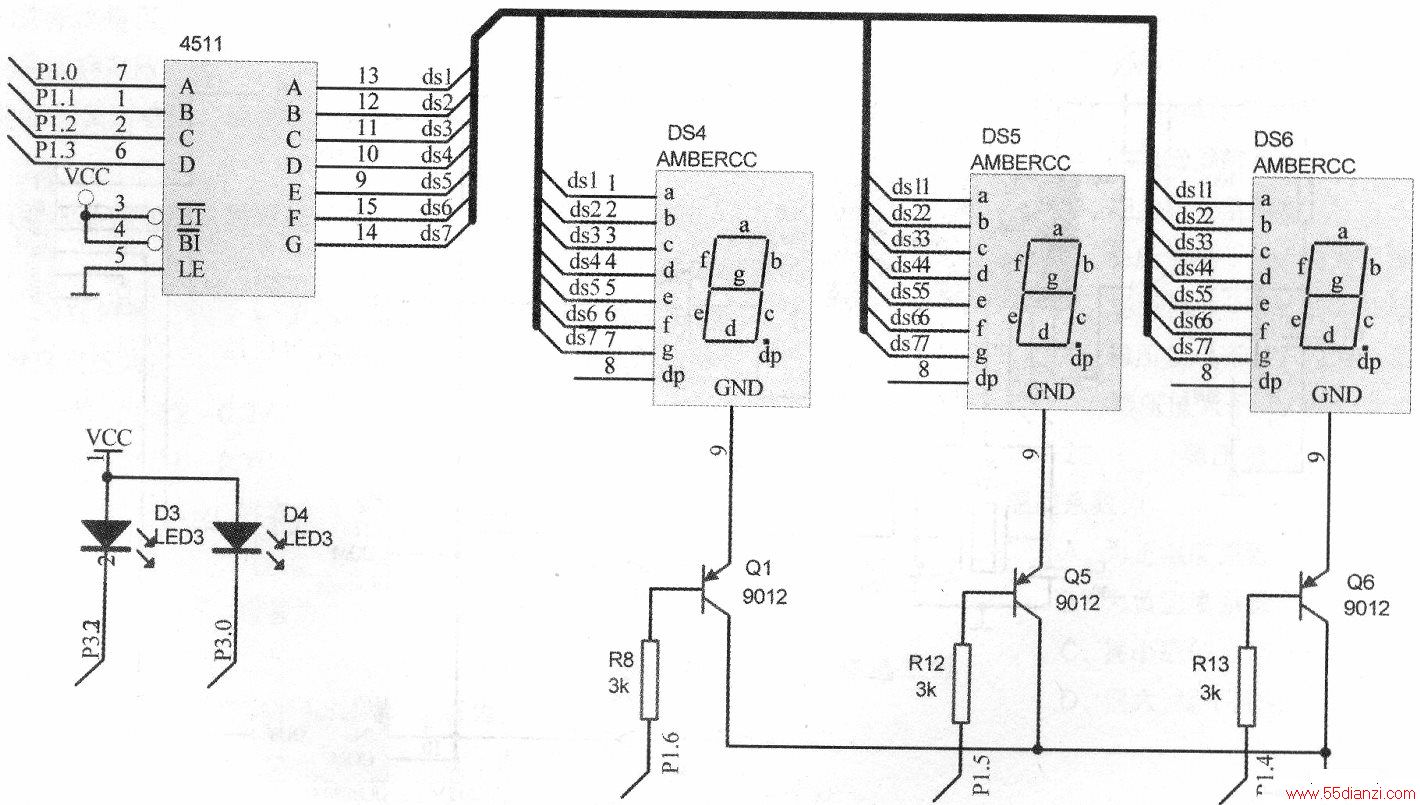
利用CD4511驱动三位数字显示器,采取动态扫描方式。为避免产生闪烁感,扫描频率必须要高于16Hz。而且扫描频率不能太高,太高会因瞬间电流下降使数码管亮度降低;同时在切换到下一个数码管时,就把上一个先关闭并延时一段时间(约50μs),再将下一个数码管的扫描位选信号送出点亮数码管。
同时采用动态扫描显示技术,可简化实际电路。
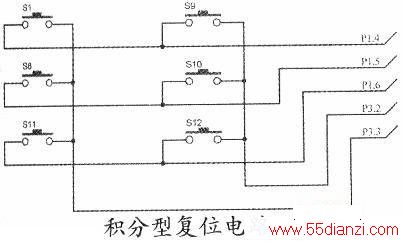
键盘电路 键盘电路也是采用动态扫描电路,目的是为了节省单片机有限的端口,但能获得所需数量的按键。本系统的扫描输出线与显示部分的扫描线是用同一组的(P1.4-P1.6),进一步节省了端口。返回线用到端口P3.2和P3.3,如图所示。
按键扫描原理 假设扫描线扫描顺序为P1.4到P1.6,69当P1.4置零后,单片机读取返回线P3.2和P3.3的状态,如果全为1则没有按键按下,如果P3.2为零,则表明“单双”按键按下,进入相应的处理程序;如果P3.3为零,则表明“百位”键按下,进入相应的处理程序。如果同时按下“单双”和“百位”键,则先处理“单双”,再去处理“百位”,就是说P3.2返回线上的按键权高于P3.3。P1.4扫描完后,把P1.4置1后,再扫描下一行键盘(P1.5、P1.6),读取返回线(P3.2、P3.3)状态,判断是否有键按下,如此反复执行。在处理按键程序前就先去抖动,防止因按键时产生的机械抖动而错误的重复执行相应程序。所有按键处理程序都是在等按下的键松开后才执行。
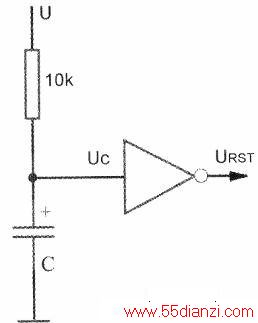
复位电路 此电当系统上电时,假设Us(t)=AU(t)为阶跃函数,U0=0,则:电路的等效电路如下图所示。仍以高电平复位为例,同样可以建立如下方程:
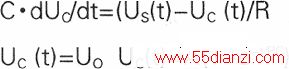
当反相器正常工作后,Uc若仍能保持在VIL以下,则其输出就可以为高电平:而且如果从反相器正常工作后开始,经过不小于复位脉冲宽度的时间Tr后,Uc才能达到VIL以上,那么上电复位就能保证可靠。
上一篇:电动机双路保险启动电路






