四相单极步进电机微步驱动电路可以作为步进电机驱动模块连接设备和使用,只需要从计算机端口或其他控制器输入简单的步进和方向信号。控制器也提供转入同步方式的控制信号。还有给监控器的M0(home)位置信号。
所有输入和输出都是光电隔离的,因此在电机控制电路中的高电压,电流和快速脉冲都与驱动器和控制信号隔离开了。
1.电源
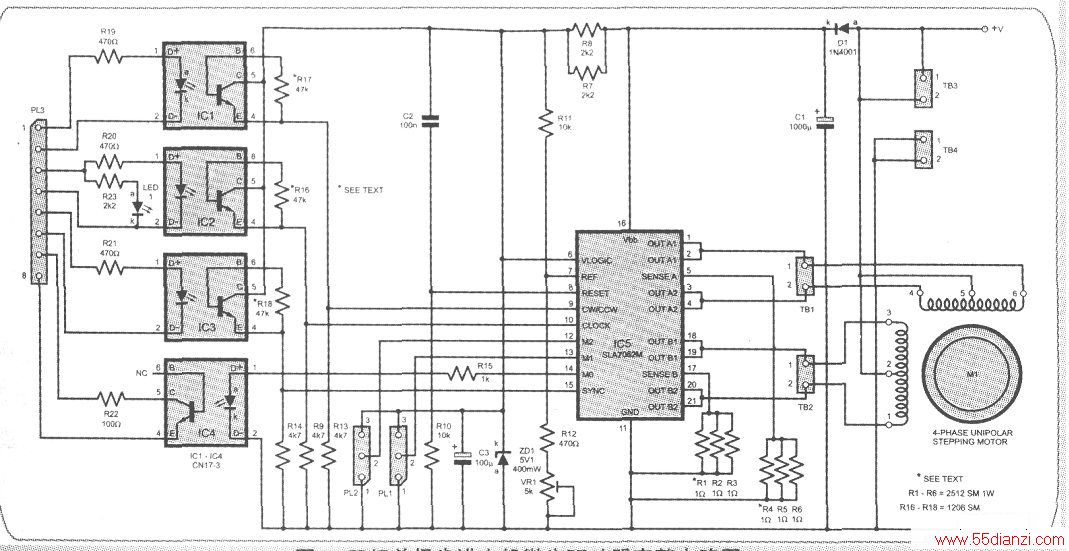
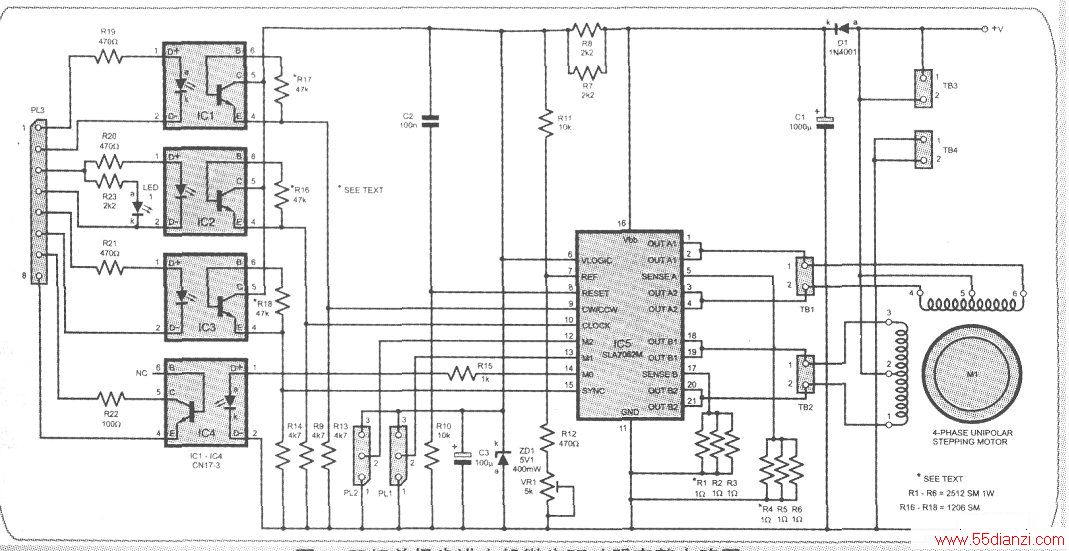
实用电路图显示于下图。从电机主电源来的电源直接加到马达绕组的中心接头上,再通过极性保护二极管D1接到驱动电路上。电容C1确保Vbb驱动电源免受干扰和噪音。驱动器中的逻辑电路借助于电阻R7,R8,并联调整齐纳二极管ZDl和去耦电容C3获得5.1V的电源。两个电阻R7和R8被用来耗散过高的功率,很容易使用其他阻值来适应不同的马达电源电压。在标称马达电源电压下这个组合电阻值选择为释放12mA电流。
2.复位电路
简单的复位电路由C2和R10提供。在加电之后,C2短时间拉高复位脚,使驱动电路进入‘初始状态’。随着C2通过R10放电,复位脚被拉低至0伏电压,使驱动器进入运行模式。
在大多数应用中,在开机之后。需要将马达置于确定的初始(homeJ位置。这通常通过低速驱动马达运动到接触某种传感器来实现,传感器通常是微动开关或光传感器,或两者的组合。此后的所有运动都从这个初始参考点开始完成。
一、步进模式
1.步进模式设置
板上有两个跳线区可以让你选择将M1和M2连接5V或OV。下表指示出这样所选择的步进模式。
输出驱动器的FET在其接地(源)端连接有电流传感电阻。即R1、R2、R3和R4、R5、R6。这是片状表面安装电阻。选择它们是由于杂散电感最小,并且提供了电路板上铜导线直接散热的方法。选择一排三个电阻使得容易设置有效的阻值,并且提高散热功率。虽然是表面安装方式,但这些功率电阻的大小使其很容易焊接。
2.电流调整
REF脚(VREF)的电压决定了输出驱动器电流控制的切断点。电阻R11、R12和可变电阻VRl接成一个分压链,它们从5.1V的逻辑电源来设置参考电压。
调整VRl可以使参考电压从OV~1.5V变化。
这个电压与跨接在电流传感器电阻上的电压降比较。VREF和R1、R2、R3及R4、R5、R6共同决定了马达的电流水平。
3.输入
马达的驱动电路有很高的电流和电压脉冲。因此将其与逻辑和控制电路隔离非常重要。使用光电隔离器是非常有效的隔离方法。因为它也去除了输入信号的接地。其还有一个优点是:仅通过改换连接光电隔离LED的方向就可以连接各种极性的信号。
提供了三种隔离输入信号:CW/CCW(方向),时钟(步进)和同步。电阻R13、R9和R14平时保持驱动逻辑电路输入为低。信号接通光电隔离器将使输入拉高。
电阻R16、R17和R侣是可选的基极下拉电阻,配备用来加快光电隔离管的通断速度。在使用16步驱动时。马达需要很高的时钟频率来飞快地驱动,因此加上R16可能是必须的。其值取决于所配备的光电管型号。但47kQ提了很好的折衷方案,既增加了速度又不会减少太多的灵敏度。
一个LED被跨接到时钟输入端。当出现故障时会被激活,给出有用的指示。逻辑输出在4.5V时有3mA驱动能力。大多数电路能够提供有效的电平。
由于输入端接了串接有电阻的LED,因此可以连接正向和负向信号。但控制器还是需要提供正确的信号极性来适应。
4.输出
借助IC4提供一个单独的隔离输出来监控MO的基本位置。这个输出必须是集电极开路信号并且需要一个负载电阻以产生有效的电压输出。这个电阻可以接在输出光电管的发射极或者集电极电路中,从而能够给出正或者负极性输出。
5.马达此电路
经过了一些小型和中等大小的步进电机的测试。只有单极性电机可以使用。这种电机通常有两个带中心抽头的绕组,连接如下图。有些电机具有四个分离的绕组,通过适当的连接,允许以单极或双极方式工作。
通过选择R1到R6的值可以设置所需要的电流水平。由于安装了3个同样的电阻,即使较大的电流水平的热量也能散发出去。如果仅使用较小的电流。可能只需要安装1个或两个电阻。
6.电源
虽然有C1对电源VBB去耦,但确保连接到电路板上的电机电源有良好的低阻抗去耦电容也很重要。在电源接入电路板的TB3和TB4之间连接至少470u的电容将能确保PWM控制器正常运行。
电机的电流由PWM电路控制而不直接由电源电压控制。但使用较高的电压也很重要,因为能使电机的电流更快地上升,从而获得更高的操作速度和更好的加速度。
使用带有先进驱动电路和较高电压的中等或较大体积的电机,如果驱动的DC电源只有4V或5V,.也能达到最大运转电流。尽量使绕组阻抗最小并且允许高的电流上升时间,可使电机的性能最大化。
SLA7062M具有44V的极限电压等级,带有适当的散热片时,能够控制的电流最大为3A。输出端FET具有浪涌保护,因此能够控制由电机电感泄漏所引起的正常的感应开关峰值。对于较大的电机,在每个绕组的末端和电机正电源之间增加一个快速钳位二极管,能够提供附加的保护。
二、结构
整体结构是一块小的双面印刷板,带有符合所有元件的镀金通孔,连接电机绕组和电源连接器的端子块和用做控制信号的O.1英寸间距的插脚。布局进行了仔细考虑,避免地线回路被通向大的直接敷铜区的电机电流所限制。
此电路板可以从EPEPCB服务公司购买。代码:710。上图给出板上元件布局和实际大小的正、反面布线图。下图指示了PCB背面上表面安装电阻的位置。为了清楚说明,图上给出了完整电路板。
在板子的正面提供了一个小的表面安装型指示发光二极管LEDl。加速电阻R16(1206表面安装型)对于高速步进旋转是必要的。但大多数应用中R17和R18不是必须的。
大多数情况下IC5是需要散热片的。这个热调整片内部接到OV,因此系统中与负极性地绝缘可能不必要。但在这种情况下要确认在散热片与电路负电源脚之间有很好的直接接触。


三、测试
与所有装置一样,测试从彻底检查组装好的电路板,看是否有元件位置错误、未焊节点和焊锡桥开始。好的清洗溶剂很有用,因为清洁的板子好检查。确认在PLL和PL2位置上的两个跳线。
简单的测试在连接马达之前进行。用万用表确认在VBB脚上的电源。5.1V逻辑电源和REF上的电压可以在OV~1.5V之间调整。设置REF脚上电压为约0.3V,提供低电流水平以便进入带马达测试。
在接通电池或电源时输入被激活。IC5上对应脚上的状态显示变化,一旦基本情况正常,就可以连接马达。电源通过限流电阻连接,以防止有故障时出现危险。装上临时散热片以防止测试期间过热,一小片铝就很合适。
在接上马达时要注意绕组的连接要正确。确保一个带中心抽头的绕组两端接TBl,而另一个绕组两端接TB2。而任一个绕组两端的绕向没有关系,因为这只会改变转动的方向(这也是最方便的方法,这样做不会改变控制逻辑)。
从信号发生器施加信号到时钟输入端就会引起马达转动。接通方向输入信号会反向转动,而每次马达经过初始(HOME)位置时MO输出都会显示接通。
在马达经过初始位置时可以接通同步(SYNC)脚,结果会减少由于PWM信号冲突引起的背景噪音。
如果一切正常,可以增加马达的电流,提高速度找到性能的极限。注意:超越马达的额定电流是危险的,某些类型的马达可能会损坏。
四、测试运行软件
登录www.nlagerta2000.co.uk,可以了解到测试和使马达低速运行的简单程序。与微步控制板兼容的CornmerclalCNC公司软件有很多来源。Magellta公司提供这个项目的完整组装元件包,参见下表的元件清单。
上一篇:电焊机空载自停节电电路






