ЁЁЁЁИљОнШ§ЯрЛьКЯЪНВННјЕчЖЏЛњЕФзЊЖЏдРэПЩжЊЃЌдкЦНУцзЊОиЕФЪИСПБэЪОЗНЗЈжаЃЌгУTuБэЪОЯрШЦзще§ЯђЭЈЕчЪБВњЩњЕФЕчДХзЊОиЃЌЕБUЯрШЦзщЗДЯђЭЈЕчЪБЃЌВњЩњЕФзЊОигыЩЯЪіЧщПіЯрЗДЃЌгУTuБэЪОЃЛдђTvЁЂЗДЯђTvКЭTwЁЂЗДЯђTwЗжБ№БэЪОVЯрКЭWЯрШЦзще§ЁЂЗДЯрЭЈЕчЪБЫљВњЩњЕФЕчДХзЊОиЃЌTuЁЂTvЁЂTwШ§ИізЊОиЪИСПжЎМфЯрЛЅВю120ЖШЕчНЧЖШЁЃМДTuЁЂTvЁЂTwЁЂЗДЯђTuЁЂЗДЯђTvЁЂЗДЯђTwСљИізЊОиЪИСПжЎМфЯрЛЅВю60ЖШЕчНЧЖШЁЃ
ЁЁЁЁ
ЁЁЁЁЕБЛьКЯЪНВННјЕчЖЏЛњЕФЖЈзгШЦзщЭЈЕчМЋадВЛЭЌЪБЃЌБуПЩВњЩњВЛЭЌЗНЯђЕФзЊОиЃЛврПЩвдШУЫљгаЕФЖЈзгШЦзщСНЯрЛђШ§ЯрЭЌЪБЭЈЕчЃЌвддіДѓЪфГізЊОиЃЌЬсИпШЦзщЕФРћгУТЪЁЃР§ШчЃЌЕБСНЯрШЦзщЭЈЕчСїЪБЃЌВњЩњКЯГЩзЊОиБэЪОЮЊT2,ЦфДѓаЁЮЊT2=ИљКХ3TЃКЕБШ§ЯрШЦзщЭЈЕчСїЪБЃЌВњЩњКЯГЩзЊОиБэЪОЮЊT3ЃЌЦфДѓаЁЮЊT3=2TЁЃСэЭтЃЌКЯГЩзЊОиЕФЗНЯђВЛЭЌЃЌОіЖЈСЫЕчЛњЪЧе§зЊЛЙЪЧЗДзЊЁЃ
ЁЁЁЁ
ЁЁЁЁЛљБОТпМЭЈЕчЗНЪНгызДЬЌБэ
ЁЁЁЁ
ЁЁЁЁШ§ЯрЛьКЯЪНВННјЕчЖЏЛњгавдЯТЫФжжЛљБОЕФТпМЭЈЕчЗНЪНЃК
ЁЁЁЁ
ЁЁЁЁ(1)3ХФЭЈЕчЗНЪНЃЌДЫЗНЪНгжЗжЮЊ2-2КЭ3-3СНжжЭЈЕчЗНЪНЃЛ
ЁЁЁЁ
ЁЁЁЁ(2)4ХФЭЈЕчЗНЪНЃЌга2-3ЭЈЕч4ХФЙЄзїЗНЪНЃК
ЁЁЁЁ
ЁЁЁЁ(3)6ХФЭЈЕчЗНЪНЃЌга2-2КЭ3-3ЭЈЕчСНжждЫааЗНЪНЃК
ЁЁЁЁ
ЁЁЁЁ(4)12ХФЭЈЕчЗНЪНЃЌга2-3ЭЈЕчдЫааЗНЪНЁЃ
ЁЁЁЁ
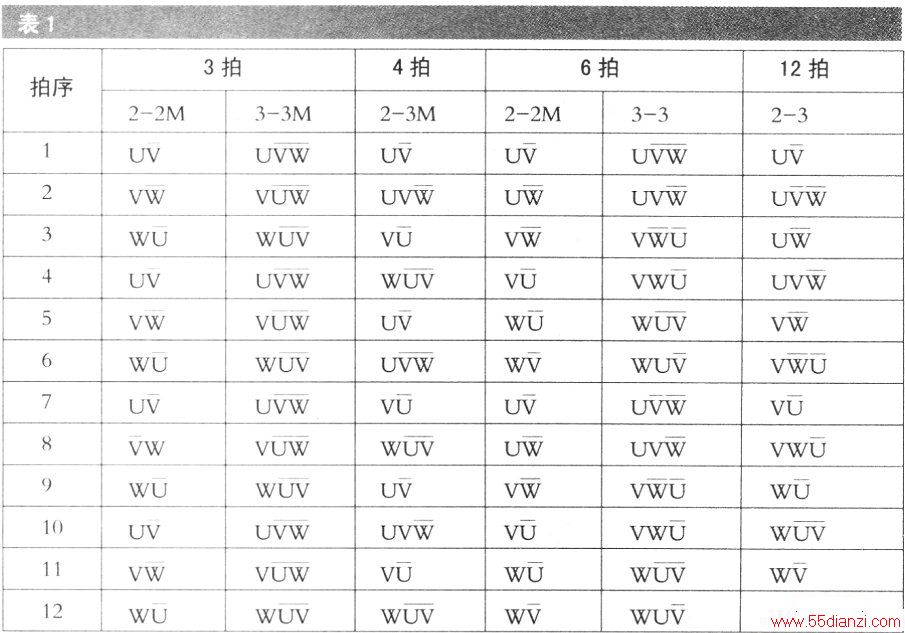
ЁЁЁЁШ§ЯрЛьКЯЪНВННјЕчЖЏЛњТпМЭЈЕчзДЬЌБэШчЯТБэЫљЪОЃК
ЁЁЁЁ
ЁЁЁЁШєзЊзгГнЪ§Zr=50ЃЌдђЕБШ§ЯрЛьКЯЪНВННјЕчЖЏЛњВЩгУ6ХФ2-2ЭЈЕчЗНЪНЪБЃЌВНОрНЧЪЧθ=360ЖШ/6Zr=1.2ЖШЃЛВЩгУ3ХФЭЈЕчЗНЪНЪБВНОрНЧЪЧθ=360ЖШ/3Zr=2.4ЖШЃЛВЩгУ4ХФЭЈЕчЗНЪНЪБВНОрНЧЪЧθ=360ЖШ/4Zr=1.8ЖШЃЛВЩгУ12ХФЭЈЕчЗНЪНЪБВНОрНЧЪЧθ=360ЖШ/l2Zr=0.6ЖШЁЃПЩМћЃЌИФБфШЦзщЕФЭЈЕчЗНЪНЃЌОЭПЩИФБфВНОрНЧЃЌВЂПЩЛёЕУНЯИпЕФЗжБцТЪЁЃ
БОЮФЙиМќзжЃКЕчЖЏЛњ ЕчЖЏЛњ-ЗЂЕчЛњЃЌЕчзгжЊЪЖзЪСЯ - ЕчЖЏЛњ-ЗЂЕчЛњ
ЩЯвЛЦЊЃКЖрЙІФмВННјЕчЖЏЛњПижЦЕчТЗЕФЩшМЦ






