按照通常的PFC电路的设置,PFC电路不便产生正、负极性的BUS电压。而在SANTAK-1053型高频机中,将PFC电路设置在市电输入与全波整流电路之间,同时在功率管与市电输入控制点之间接一只极性校正用整流桥,使这一问题便得到了解决。
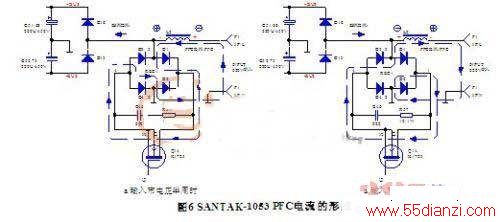
图6为SANTAK-1053型高频机PFC电流的形成图。当市电为正半周时,市电流经D1、D4、Q14/D、Q14S形成回路。当市电为负半周时,市电流经D2、D3、Q14/D、Q14S形成回路。因此,无论在市电的正半周还是负半周,都有PFC电流流经Q14,并且都是从D极流进,S极流出。这样,这种PFC电路处理的就是全波电压,可以很方便的得到正负对称的BUS电压。
三、SANTAK-C3K(S)型高频机中的PFC电路
⒈SANTAK-C3K(S)机PFC电路的结构
图7所示为SANTAK-C3K(S)机的PFC电路图。
SANTAK-C3K(S)机中的PFC电路与SANTAK-1503型机中的PFC电路在结构上有较大的不同:
⑴在SANTAK-C3K(S)机中,PFC的控制电路中没有使用常见的PFC芯片如UC3854等,而是采用了常见的开关电源PWM芯片UC3843。
⑵在SANTAK-C3K(S)机中,PFC控制管电路的基本结构是相似的,只是因为输出功率较大,PFC控制管Q09采用了IGBT管,但是PFC信号电路却迥然不同。
⑶在SANTAK-C3K(S)机中,将PFC的主要电路制作在两块小电路板上,并垂直插焊在主电路板上。
⒉波形变换电路
参见图7所示。PFC电路的作用是根据市电和±BUS电压的幅度变化,产生相应的控制脉冲,通过PFC功率管调整市电输入电流(市电工作时)的和±BUS电压(电池工作时)的大小。
CPU根据检测到的市电输入电压和输入电流以及±BUS电压的数据,从○34脚输出相应的方波脉冲串,脉冲串中的脉冲宽度是变化的,代表了CPU的控制信息。但后面的PFC控制电路却不能直接处理幅度恒定宽度(周期)变化的电压波形,必须将其转换为幅度变化的电压波形。为此,将CPU○34脚输出的脉冲串加至由U22B及周边元件构成的二阶滤波器,从二阶滤波器出来后就变成了正弦波信号,它的幅度变化代表了CPU的控制信息。
⒊PFC小板
⑴PFC小板的组成及功能
PFC小板由U401、U402,Q401、Q402及周边元件组成,见图7左下所示。
二阶滤波器输出的信号经接插件CN1/1,CN10/1加至三极管Q402的基极,Q402基极接有由R401、R412组成的分压器,将+5V电压分出约0.5V给Q402基极,所以二阶滤波器输出的电压超过0.5V时Q402即饱和,将U401○1脚接地,于是U401关闭,输出端○6脚所接的PFC功率管也关闭。当二阶滤波器输出的电压低于0.5V时,Q402截止,U401开通,输出端○6脚所接的PFC功率管也开通。二阶滤波器输出电压幅度变化时,U401开通的时间也随之变化。
由上述过程可见,CPU输出脉冲宽度的变化,在二阶滤波器中变成了幅度的变化,经过U401以后,又变成了PFC功率管开通于截止的时间的变化,实现了CPU对PFC功率管的控制。
⑵PFC过流保护
PFC功率管流过的瞬时电流与市电的输入电流属于同一数量级,一旦失控,将造成电路器件的损坏。为此设置了PFC过流保护电路。
PFC过流保护电路由PFC过流检测传感器CT2及周边元件组成。CT2初级串接在PFC功率电路中,PFC电路工作时,次级感应出的电压经D24、R408、C406滤波加至U401○3脚,PFC电路一旦发生过流,U401即关闭。R88是负载电阻。D40整流后不经滤波,保留了波形中的突波部分,使保护更加灵敏。
⑶PFC电路的关闭
当PFC电路需要关闭时,CPU○35脚输出高电平,经R305、接插件CN1/7、CN12/2、R406、R410加至U401○2脚,使U401关闭。与此同时,CPU○35脚送出的关闭信号还经R305送至比较器U402A的反相输入端○2脚,只要○2脚电压超过○3脚电压,U402A输出端○1脚即为低电平,使U401关闭。由于PFC电路采用了双重关闭措施,所以关闭十分可靠。
⑷斜坡补偿
为了保证在占空比大于50%时开关电源能稳定工作,需要对电路进行斜坡补偿,其原理如前所述。本机斜坡补偿仍然采用的是将定时电容的充放电波形与电流采样电压波形相叠加的方法,参见图7所示。
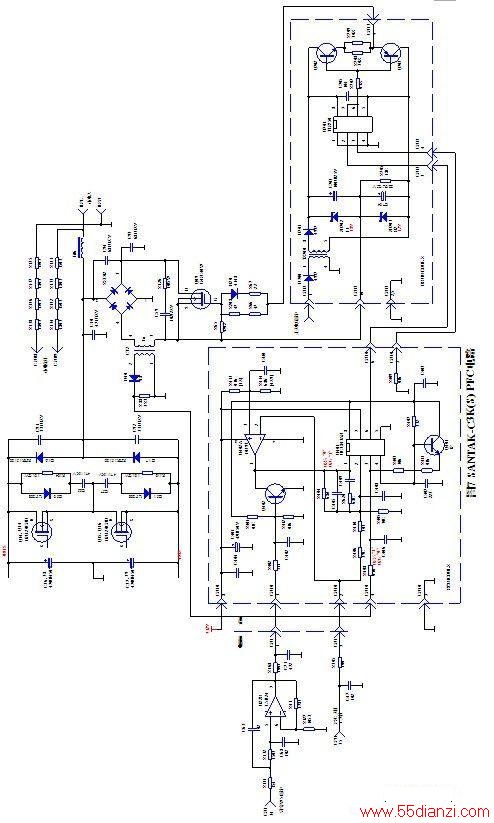
图中Q401为斜坡补偿三极管。Q401发射极接至U401○8脚提供的+5V稳定电压。基极接至U401○4脚。Q401发射极经电阻R411、R403接至U401○3脚。显然,Q401接成射极输出器的形式,将C401的充放电波形送入Q401基极,与功率管送入U401○3脚的电流采样电压相叠加。于是,两条曲线相叠加后的幅度大大增加,整个曲线的斜坡坡度增大。补偿前接近触发电平的斜坡曲线是平缓的,补偿后接近触发电平的斜坡曲线是急速上升的,在同样位置同样幅度的干扰脉冲,已不能使开关电源提前截止,从而有效的保证了开关电源稳定的工作。
⒋驱动小板
在SANTAK-C3K(S)机中,逆变驱动电路和PFC驱动电路的结构完全一样,统称驱动电路。驱动电路制作在一块小板上,称为驱动小板,标号为DUR/MODULE。驱动小板的原理图见图7右下所示。
在驱动小板中,由主板开关电源变压器TX201次级送来的开关电源脉冲,经接插件CN13/1、D700送入驱动小板内的开关变压器TX700的初级,次级电压经D701整流、C703、C704滤波,ZD702、ZD703稳压后,产生驱动三极管所需的正负驱动电压。正驱动电压加至上驱动管Q702的集电极,负驱动电压加至下驱动管Q703的集电极,正负驱动电压的公共点,即0点经接插件CN13/9输出作为输出信号的参考点。
图中U701(TLP250)既保证了功率驱动电路与PWM脉宽调制电路的可靠隔离,又具备了直接驱动MOSFET的能力,使驱动电路简化。
TLP250为双列直插8脚封装。其中○1、○4脚为空脚。○2脚为内部发光二极管正极,○3脚为内部发光二极管负极。○8脚为内部上驱动管集电极,○5脚为内部下驱动管的集电极,○6、脚为输出端。
图中R707为消振阻尼电阻,消除电路中的自激振荡因素。R708、R709为自给负偏压电阻。当上驱动管饱和、下驱动管截止时,R708、R709可压低下驱动管发射极电位,使基极电位高于发射极电位,因而使下驱动管可靠截止。同样道理,当上驱动管截止、下驱动管饱和时,R708、R709可抬高上驱动管发射极电位,使基极电位低于发射极电位,因而使上驱动管可靠截止。
图中U701○3脚经接插件CN13/4、CN10/5、R409接地。U701○2脚经接插件CN13/3、CN10/6接至PFC小板上U401输出端○6脚。当U401○6脚为低电平时,内部发光二极管截止,U701○6、○7脚输出为高电平,上驱动管饱和,下驱动管截止,驱动小板输出端经接插件CN13/9 输出高电平。而当U401⑹脚为高电平时,内部发光二极管导通,U701○6、○7脚输出为低电平,上驱动管截止,下驱动管饱和,驱动小板输出端经接插件CN13/9输出低电平。
至此,由驱动小板经接插件CN13/9输出的信号,经过一系列变化,又恢复成CPU○34脚输出的那种幅度恒定,宽度变化的脉冲串了。
⒌SANTAK-C3K(S)机的PFC电路
由图7可见,市电相线经PFC电感L06进入由D16、D17,C36、C38、C37、C39组成的全波整流滤波电路,PFC电路只是控制市电电流的大小,并未切断市电通路,不影响整流电路的基本功能。
驱动小板输出的PFC控制电压送至PFC开关管Q09栅极。由于SANTAK-3CK(S)机的输出功率较大,所以PFC管Q09采用了IGBT管。D20是Q09的加速二极管,使Q09关闭时基极电荷能快速泄放掉。R67可以限制泄放电流的大小。R208、R66为Q09的阻尼电阻,防止Q09可能产生的自激振荡。R65是栅负压电阻,当Q09截止时,驱动小板输出的是负电压,电流由Q09S极→R65→Q09G极,在R65上产生S端正G端负的电压,将Q09的G极拉负,使Q09深度截止,消除了误导通的可能性。C59、R126组成Q09和整流模块REC02的吸收电路,用以避免尖峰电压造成的损坏。
图中REC02是桥式整流模块,在这里起极性校正作用,它可以保证无论是输入市电正半周还是负半周,PFC电流都由Q09的D极流向S极。PFC电流的形成参见图6所示。
由于市电输入电路中串有PFC电感L06,所以,控制送入Q09栅极脉冲的宽度,即可控制流过L06电流的大小,使其与输入的市电电压波形保持良好跟踪。同时,也正是因为市电输入回路中串有L06,所以送入由D16、D17构成的全波整流电路中的电压能够高于市电电压,经整流滤波后得到的直流电压也得到提升。我们知道,在一般情况下,经全波整流和滤波后,只能得到约310V的直流电压。而在C3K(S)机中,经PFC电路升压后可得到约400V的直流电压,两组滤波电容串联后即可得到±400V的±BUS电压,与升压电路输出的直流电压相当。
在实际工作时,输入的市电电压幅度可能有波动,这将引起±BUS电压的波动。为了保证电路在市电状态下工作时±BUS电压的稳定性,CPU将实时检测±BUS电压,以±BUS电压幅度的变化来调整CPU○34脚输出的脉冲宽度,从而调整PFC电流的大小,最终使得±BUS电压能够保持稳定。
本文关键字:校正 功率因数技术,电源动力技术 - 功率因数技术






