寻迹机器人,也叫循迹机器人,或称为走黑线机器人。它是通过光电传感器识别地面上的轨迹,随时调整自己的运动方向以使自己始终沿着轨迹行走。与前面几期制作的机器人相比,寻迹机器人添加了光电传感器,使机器人有了“视觉”。制作与学习寻迹机器人可以很好地了解光电传感器的工作原理及结构,并学习编写较为复杂的选择结构和循环结构的程序。以及简易机器人中传感器识别周围环境的原理及复杂程序的编写。
下面按以下几个步骤进行制作:
一、搭建机器人机械结构
1.机械部件清单
制作寻迹机器人所需的机械部件如下表所示。
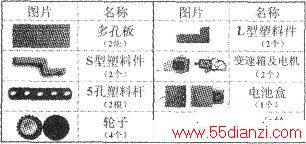
2.机械结构分析
寻迹机器人机械结构主体是三轮小车。前二个车轮分别由电机驱动,后面的万向轮起支撑和从动作用。
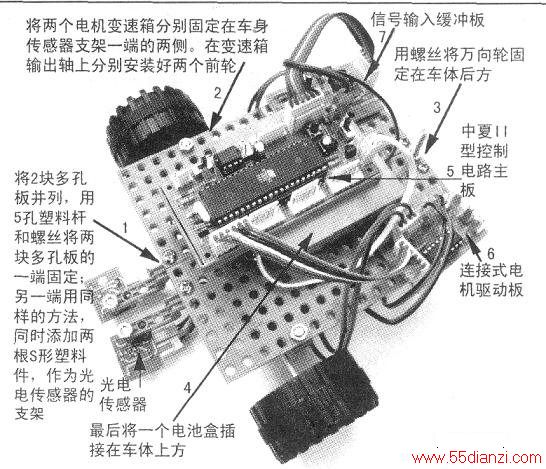
3.制作过程
寻迹机器人制作过程,见下图所示。
二、准备电路部件
1.准备电路部件
寻迹机器人需要的电路部件有中夏Ⅱ型控制电路主板1块、连接式电机驱动板1块、信号输入缓冲板1块、单光反射传感器板(简称光电传感器)2块、连接线若干。
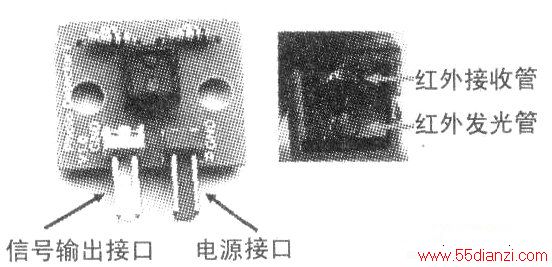
2.光电传感器结构及工作原理
光电传感器有两个接口,红色为电源接口,白色为信号接口。光电传感器板上有一个红外发光管(或红外发射管)和一个红外接收管。结构如下图所示。
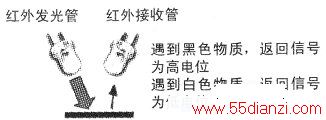
光电传感器板工作时,红外发光管能发射红外线,当它遇到障碍物时反射到红外接收管上,红外接收管受到红外线的照射后阻值发生变化,形成高电位和低电位。不同颜色的物体表面的反射能力不同,一般白色物质反射能力强,黑色物质反射能力弱,这样为物质识别提供了基础。在这里,遇到黑色时光电传感器返回的信号为高,遇到白色时返回的信号为低。其原理图如下图所示。
信号输入缓冲板主要作用是抗干扰,提高输入信号可靠性。
信号输入缓冲板最多可以接收4组输入信号,每一组信号输入时都要分别连接信号输入端口和电源端口。最后信号输入缓冲板将这四组信号用一个六针输出接口输出。其结构图如下图所示。
准备好电路部件后,分析实施方案。经过分析研究,要想完成寻迹任务利用一个光电传感器和利用二个光电传感器都能实现,并且结构的不同导致程序的编写也不相同。下面就分别讲解这两套方案的具体实施方法。
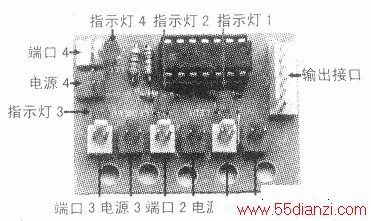
3.信号输入缓冲板
三、实施方案
利用1个光电传感器完成寻迹任务。
1.电路连接过程
第一步:光电传感器的信号接口和信号输入缓冲板的端口1连接,光电传感器的电源接口和信号输入缓冲板的电源1连接。
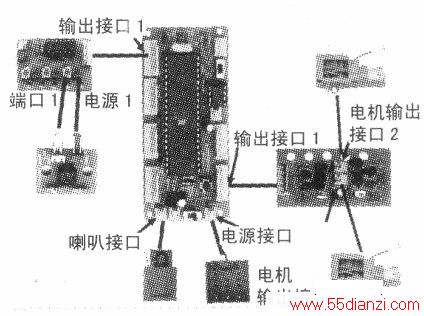
第二步:信号输入缓冲板的输出接口与主板输入接口1连接。
第三步:主板的输出接口1与电机驱动板的输入接口连接第四步:左边电机引线与电机驱动板输出接口1连接,右边电机引线与电机驱动板输出接口2连接。
第五步:电池盒的电源线与主板的电源接口相连,电池盒的扬声器引线与主板的喇叭接口相连。
装上电池,打开电源开关,使用主板自检程序对机器人进行测试。此时,电机开始转动,用手挡住光电传感器,信号输入缓冲板指示灯1的变亮,这表示电路部件工作正常,电路连接正确。
电路连接示意图,如下图所示。
连接好电路部分,将光电传感器固定在车身前端的传感器支架上,其他电路部件放置在车身相应位置。
2.编写程序
寻迹机器人的工作过程:首先是光电传感器识别地面颜色,然后将信号传输给主板。主板接收信号后,根据信号的不同(即颜色的不同)发出不同动作指示。
在这里,我们指定识别到黑色时做右转动作,识别到白色时作左转动作。工作示意图如下图所示。
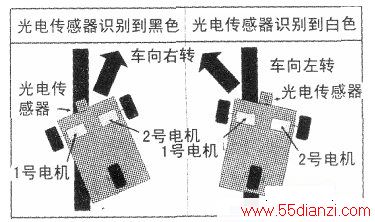
为了让机器人右转,需要产生向右转的力矩,我们可以让左边电机正转,右边电机停转。同样道理,机器人左转可以通过让左边电机停转,右边电机正转来实现。
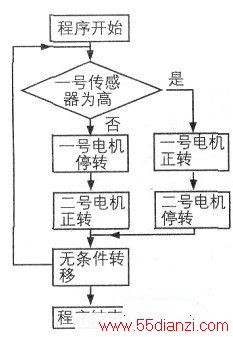
根据刚才的分析,编写程序,如下图所示。
3.下载程序并运行
将程序下载到机器人的主板后,去除下载线,按运行开关,将下载状态调整到运行状态。此时观察到机器人可以沿黑线行走,但是它的速度很慢,行进路线呈Z字形,左右摇摆。怎么能够让寻迹机器人速度更快一些呢?我们可以再增加一个光电传感器。
四、实施方案2
利用2个光电传感器完成寻迹任务。
1.电路连接
将第二个光电传感器与信号输入缓冲板的第二组接口相连。并将它固定在传感器支架上,让两个传感器并列放置。
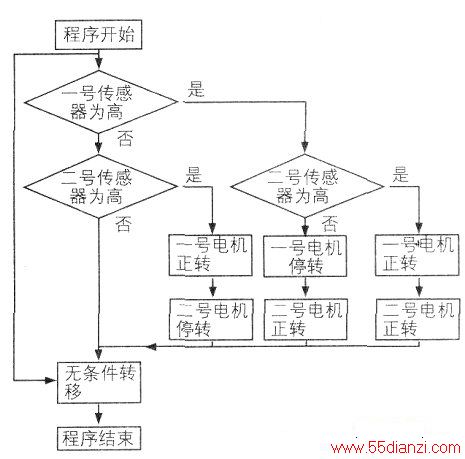
2.编写程序
寻迹机器人的工作过程,首先是两个光电传感器识别场地颜色,并将信号传输给主板。主板再相应做出动作指令。两个光电传感器可能出现的状态有4种,主板相应做出的动作指令也有4种,如下表所示。编写程序如下图所示。
3.下载程序并运行
将程序下载到机器人的主板后,运行机器人。观察发现:
根据方案2制成的机器人不仅沿黑线行走,而且速度比方案1快,运行起来也比较平稳。
五、调试
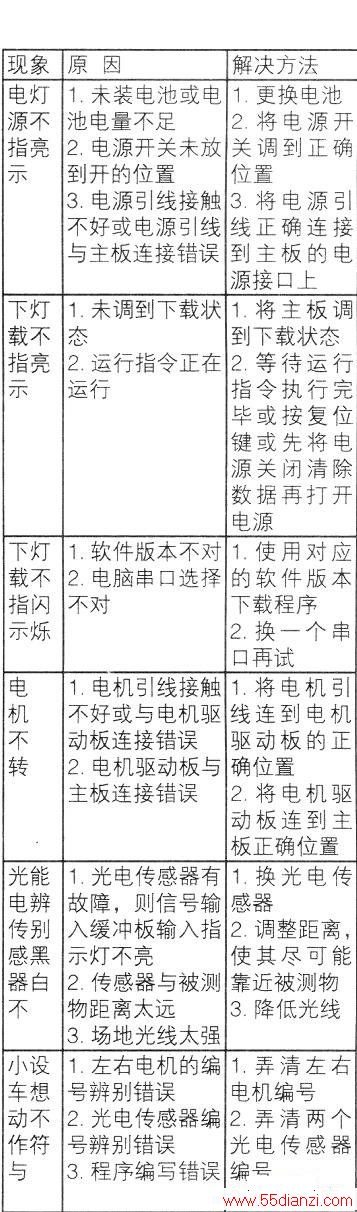
机器人一般来说,刚制作的机器人,需要进行调试。调试过程中,寻迹机器人出现的问题大多集中在传感器和电机编号及程序编写上。
下表中给出了寻迹机器人可能出现的问题及解决方法,供大家参考。
本文关键字:机器人 机器人-智能车,电子知识资料 - 机器人-智能车






