探究机器人导航术的一种效方法是把它看作一场足球比赛。队员的目标是把球踢进球门。球门被对方的球员守卫着,所以不是轻而易举能进球的。
同理,在机器人和它的目标之间有很多障碍物。这些障碍物包括人类、椅子、猫、水坑、电线——所有影响机器人在房间或庭院里行走的东西。
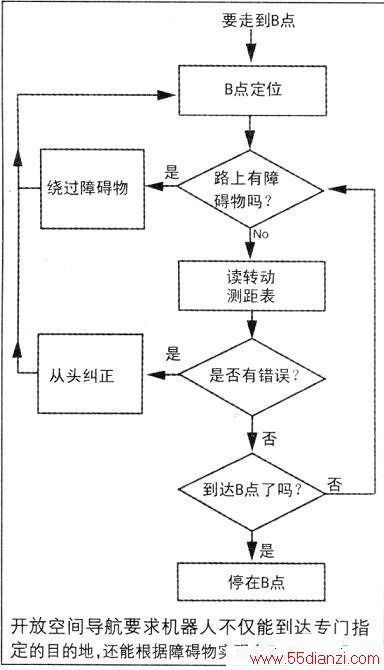
从A点到B点,机器人将会考虑以下过程(如下图所示)。
1.改变目标(到达B点)的指令:可能由于内部因素(如电池电压变低,必须回到充电站)或程序及外部命令引起。
2.确定B点相对于机器人当前位置(A点)的距离,及确定到达B点的路径:这需要使用已知的路标或是参照物。
3.避开途中的障碍物:如果遇到不能移动的障碍物就绕过它们并重新计算到达B点的路径。
4.导航过程中纠正(如轮子滑动所引起的)错误(纠正路径的错误):可以通过定期地核对已知路标或参照物来计算当前位置。
5.可选项:如果在指定时间段或距离内没有到达目的地为超时(放弃)。
要注意新出现的会妨碍或阻止机器人到达目的地的问题。
如果途中有不可移动的障碍物,机器人必须绕过他们。这意味着要重新计算预先确定的从A点到B点的路径。位置和方向错误是正常的也是意料中的。你可以通过让机器人定时重新估算它的位置,从而减少错误造成的影响。这可以通过使用大量的参考物:例如对照地图,有源信标,或是路标进行。
机器人是一台机器,他并不知道(或不在意)自己没能到达目的地。应该考虑到机器人可能永远不能到达B点时的处理。这可以通过使用超时来判定,超时既可以限定到达目的地的最长有效时间,更可以限定到达目的地的最长有效距离。
你同样可以在系统中设置其他故障保险,包括在机器人无法用已知的路标或参考物来重新判断当前位置时取消这一程序。这种情况下,意味着传感器已经坏了或是路标和参照物不起作用或不精确。一种处理方法是,关掉机器人等待他的主人来修理。
本文关键字:机器人 机器人-智能车,电子知识资料 - 机器人-智能车
上一篇:机器人沿着预定的路径行进路线跟踪






