本设计是基于单片机控制的思想.选用廉价的遥控编码解码集成电路(PT2262/PT2272),采用L298N专用电机驱动芯片驱动电机,通过PWM脉冲调速。
外围安置红外传感器,从而达到智能控制的目的,实现了小车的无线智能遥控,整个系统功能全面。
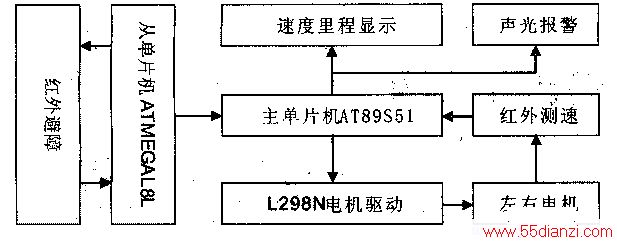
一、系统总体设计与框图本设计主要由无线遥控模块、电机驱动与控制模块、精确调速模块、红外避障模块、声光报警模块、里程显示模块几部分组成。
总体设计思想为:系统以AT89S51单片机作为主控制核心(主单片机),通过采用遥控编码、解码集成芯片PT2262/PT2272 无线发送、接收操作指令,主单片机AT89S51接收到操作指令后,对当前的传感器进行查询,根据传感器传来的信息,对当前的环境作出判断,最后根据指令综合环境信息对电机作出相应的控制动作。
在这里还使用了一个从单片机 ATMEGA8L,它的任务是对红外传感器进行控制以及将数据传送给主单片机AT89S51。另外,电机驱动与控制采用专用电机驱动芯片L298N,通过PWM(脉宽调制)脉冲调速,同时通过光电门与红外接收管进行脉冲测速.主单片机根据测速脉冲控制PWM电路实现电机速度的精确调整与方向控制,而声光报警、液晶显示全程行驶的时间和里程等都是由主单片机来控制完成。
系统框图如下图所示。
二、模块电路设
1、无线遥控模块电路设计
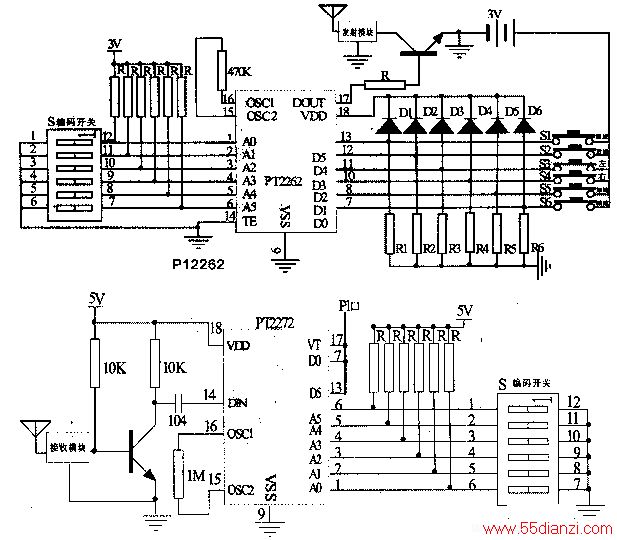
采用遥控编码、解码集成芯片PT2262/PT2272为核心器件,它们是一对带地址、数据编码功能的无线遥控发射/接收芯片,其中发射芯片PT2262-IR将载波振荡器、编码器和发射单元集成于一身,使发射电路变得非常简洁。TP2262是一种编码器,它能将数据和地址编译成代码的波形。它最大有12位三态地址.共有531441种地址代码。它最大有12位三态地址。共有531441种地址代码。PT2272是一种与PT2262配对的解码器,它也具有12位三态地址,共有531441种地址代码。只要任意选择其中一种,保证编码一致就可以,因而具有实现很强的抗干扰能力。
下图是PT2262构成的编码发射电路,图中。PT2262的VDD是通过按键接通后向芯片供电这样静态时.PT2262并不耗电,特别适合是电池供电的遥控场合。
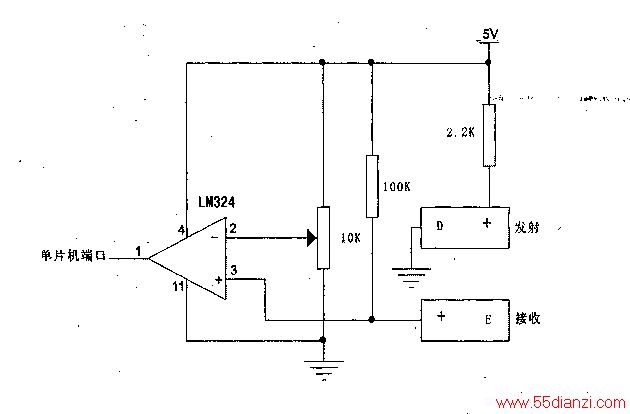
下图是PT2272构成的编码接收电路.为了能正确解调出调制的编码信号,接收端需加一级前置放大级,保证输入PT2272的信号幅度足够大。
PT2272各输出端接主单片机P1端口。
同时PT2272具有锁存功能.即当发射信号消失时,PT2272的数据输出端仍保持原来的状态.直到下次接收到新的信号输入,这一功能使得软件编程控制更加简单可靠。
2、电机驱动控制电路设计
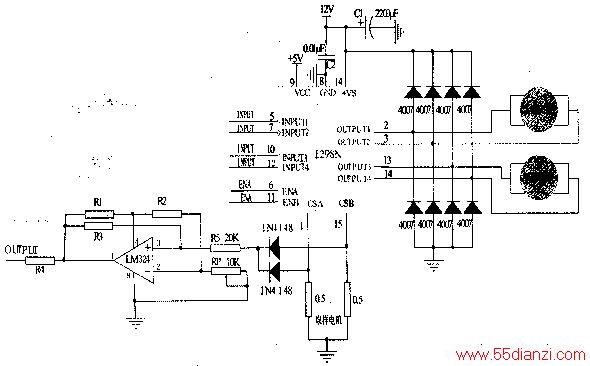
利用L298N集成电路片驱动两个电机.分别控制小车的左右轮。采用PWM(脉冲宽度调制)电路,精确调整电动机转速。L298N是为控制和驱动电机设计的推挽式功率放大专利集成电路器件。该芯片有两个TTL/CMOS兼容电平的输入.具有良好的抗干扰性能:四个输出端具有较大的电流驱动能力,每通道峰值电流能力可达3A。L298N可以通过脉冲调制控制直流电机的速度.这种调速方式有调速特性优良、调整平滑、调速范围广、效率高等优点。实验中VDD电压应该比VCC电压高.否则有时会出现失控现象。其控制逻辑关系见下表。
L298N驱动电机电路和赌转保护电路图下如所示,另外在小车的电机应用上为防止蹩车而使电机被烧坏,我们采用运算放大器应用中的电压比较器的功能.在蹩车时电压的变化使发光二极管工作.发光二极管形成光信号报警。
3、精确调速模块电路设计
采用PWM脉冲调速的方式实现对小车速度的控制。这种调速方式有调速特性优良、调整平滑、调速范围广、过载能力大,能承受频繁的负载冲击,还可以实现频繁的无级快速启动、制动和反转等优点。
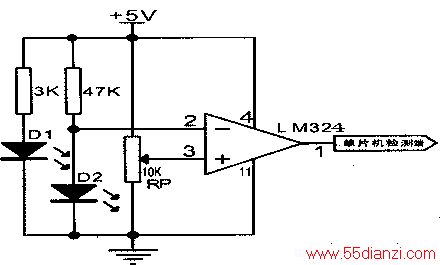
为实现电机转速的精确调整,我们制作了车轮速度测量电路。对左轮测速我们采用分立型红外发射一接收管来实现。在推动左轮运转的机械齿轮上均匀的钻1个小孔,红外发射管和接收管分别位于机械齿轮的两侧.电路图如下图所示。常态时红外接收管没有接收到光,检测端输出为低电平;当透过小孔,接收到光时,单片机检测端输出为高电平,从而得到与左轮速度相关的一组脉冲信号,由于机械齿轮间的变速作用,经测量左车轮转一圈可得到12个均匀脉冲信号。
对右轮的测速也可以用同样的方法.但是我们在实际制作时由于受车模空间的限制.采用了遮挡型红外传感器一一光电门。在推动右轮运转的小机械齿轮上粘一块小黑纸片.光电门对准小机械齿轮。光电门电路如下图所示。常态时,受光部分能接收到光,通过比较器后.检测端输出高电平;当受光部分没能接收到光时,检测端输出低电平,从而得到与右轮速度相关的一组脉冲信号。经多次测量知道,右轮转一圈也可得到12个脉冲。
利用单片机内部的计数器分别对左右轮脉冲信号进行计数,然后比较两计数器的计数值是否相等,在不相等的情况下,由单片机控制PWM电路实现电机速度的精确调整。同时由单片机定时器根据高低电平计数脉冲与车轮周长通过算法得出车速.再根据车速和行驶时间得出行驶里程。
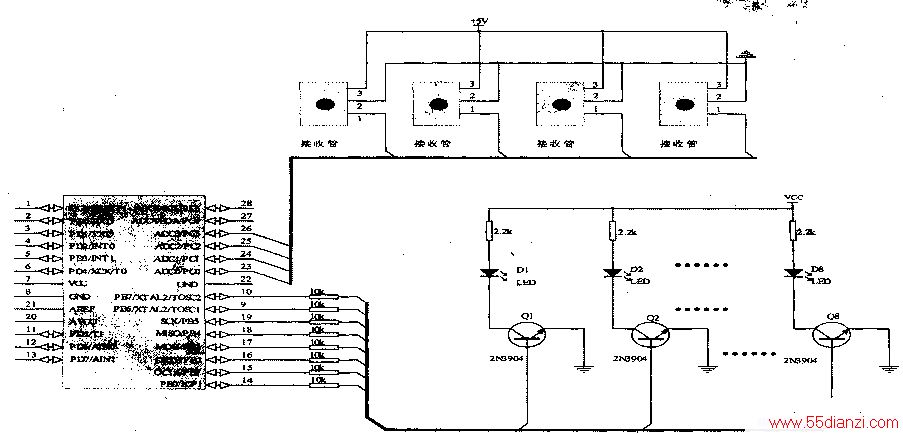
4、红外传感器避障模块电路设计
电路如下图所示,红外发射管通过三极管和电阻接到一从单片机的PB口,红外接受管的数据口接到它的PC口,当检测到有障碍物时。接受管的数据口输出为低电平并送从单片机。若未检测到障碍物.则接受管的数据口输出为高电平。由于所使用的接受管内部有一选频网络,使该接收管只对频率为38kHz的信号起作用.因此可以有效的减小外界光的干扰,特别是200W的白织光源。该38KHz的信号由单片机系统时钟信号经分频而得到并通过PB口由红外发射管发射。另外,单片机控制红外发射管发射红外光采用的是断续式,即可定时发射或关闭发射,若一直让红外发射管发射,则接受管接受到的电平一直为高电平,相当于接受管没有正常工作。这样,采取断续式控制方式可以彻底地避免环境干扰。
在实物的装配中,我们使用了四组红外发射一接受管装置(每组由两个红外发射管和一个接收管组成)。将这四组装置分别置于小车车体的四个角上,并与车体纵向成一定的角度.这样在小车前进或倒退时都可以躲避障碍物,且能大大扩展避障范围,达到准确避障的目的。
5、LCD显示与声光报警电路设计
我们采用字符型液晶模块HS162-4显示小车的行驶时间、速度和里程。RS为寄存器选择,高电平时选择数据寄存器、低电平时选择指令寄存器、RW为读写信号线,高电平时进行读操作。低电平时进行写操作。当RS和RW共同为低电平时可以写入指令或者显示地址,当RS为低电平RW为高电平时可以读忙信号,当RS为高电平RW为低电平时可以写人数据、DO~D7为8位双向数据线,如下图所示。
上一篇:移动机器人视觉定位研究






