旋转坐标型手臂能提供了较大的灵活性,而且只需要很少的部件。下面所讨论的手臂只有两个自由度。但是,你会发现,虽然只有两个自由度,该手臂也能做许多事情。它可作为静止的“拿起一放下(物体)”型的机器人单独使用,也可以装在移动的平台上。这里给出的构建手臂的讨论只针对左手臂,右手臂的构建只是左手臂的镜像。
你会注意到手臂上缺少手掌一抓取器。但是,它可以连接任意类型的抓取器。事实上,你可以自行设计其前臂使其可接受能替换的不同类型的抓取器。手部的抓取装置的设计方案将在以后讨论。
一、设计方案概述
旋转坐标型手臂的设计模仿人类手臂的机能。轴向安装的肩关节使其能转动(自由度#1)。可绕关节旋转的摇臂使肘部弯曲运动(自由度#2)。
可以加上的第三自由度一肩部弯曲一可由安装在肩部后面的另一个关节直接完成。但在测试中发现基本的两个自由度的手臂能够胜任大多数的任务。当然,它最好装在可移动的平台上,使机器人可移动其手臂接近或离开所要抓取的物体。这虽然简陋,但在某种程度上,比增加另一个关节简单得多。
二、肩关节和上臂
肩关节是一根轴,该轴与安装在手臂基座或机器人身体上的轴承相连,轴上固定有一个驱动电机使肩部能上下运动。该电机与一个单级齿轮系统相连,如下图所示(部件见下表)。在本手臂模型中,电机的转速22转/分,即约每秒三分之一转。
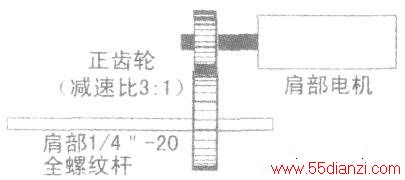
对于肩关节来说,22转/分稍微偏快了。可选择3:1比例的齿轮来降低三倍速度(同时电机增加三倍扭矩)。
通过齿轮系统,肩关节以每8秒钟转动一周的速度运动。似乎挺慢,但要记住肩关节只能在小于50度的弧(或约七分之一的圆)内摆动。因此,肩部能在两秒钟之内从一端运动到另一端。
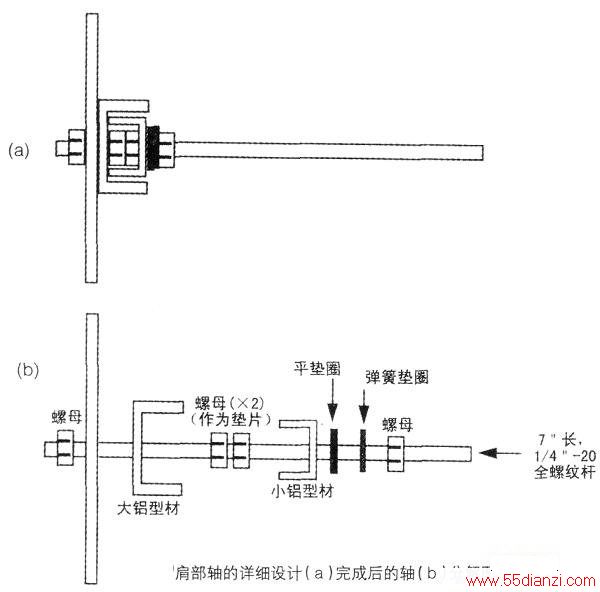
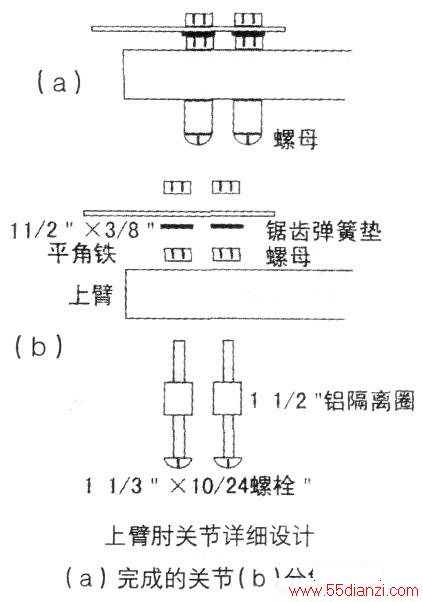
参见下图,上臂是由10”长(57/64"×9/16"×1/16")的铝型材配以10"长(41/64"×1/2"×1/16")的铝型材组成。将二者互相套上组成一根杆。离型材片末端1/2"处钻一个1/4"大小的孔。截取一段7"长的1/4"-20的全螺纹杆(该尺寸主要取决于肩部电机的结构,但是7"已提供了改变的余地)。在杆的末端拧上一个1/4"-20的螺母,平垫圈和弹簧垫圈。在螺母的外侧留出大约1/8"到1/4"空隙。("=英寸)在一片33/4"半径的金属电插座盖板的中间钻一个1/4"的孔。在该孔和较大的铝型材的孔中间插入螺杆。在杆上拧上两个1/4"20的螺母作为隔离圈,然后连上较小的铝型材。用一个平垫圈、锯齿弹簧垫圈和一个1/4"20螺母锁住两块铝材。肩部安装完成。
齿轮传动系统用来驱动旋转手臂。如果电机输出速度太快,也可用内置减速齿轮的电机。
三、肘部和前臂前臂
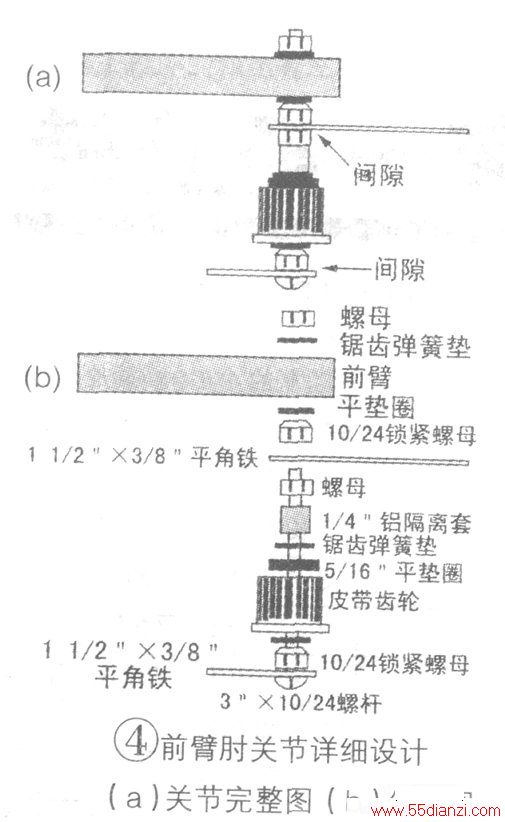
连接在上臂的末端。此关节的作用像肘。前臂的构造很像上臂:将大小铝型材截为8"长。构建肘关节如上图和下图.需要用到两块1/2"×3/8"平角铁,1/2“隔离片和10/24部件。
3/4”长同步齿型带(5牙每英寸)用来传输肘部电机的动力,该电机安装在肩部。完整肩部构造如右图所示。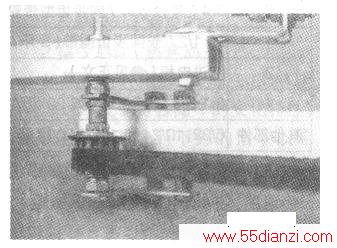
事实上你可以使用任何型号的同步齿型带和齿轮。当用到表1所列型的齿轮时,同步皮带为201/2"。如果你为肘部或其电机配备其它尺寸的齿轮,可能需用到其他长度的皮带。可通过安装肘关节接近或远离前臂末端来调节空隙。
你也可以使用25号链条来提供轴部动力。在轴部和电机轴上加上链轮。
二者通过链条相连。你需要根据所用的链轮的尺寸进行试验来匹配链条的准确长度。
当肘部和前臂组装完成,在其肩上安装电机,可直接安在盖板上。我们的旋转坐标型手臂样机所选择的电机为一安培中功率的步进电机。电机上预先钻好的孔使其很容易安装在手臂上。一个3"×3/4"“T”型加强片用于紧固板上的电机。在板上钻孔与电机上的孔相匹配(17/8”间隔),“T”型片在交叉处被折弯。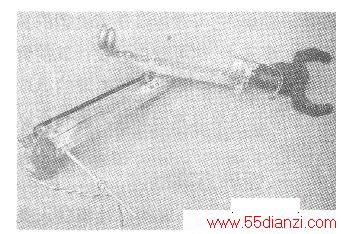
拧开轴上固定盖板和前臂的螺母,安上“T”型片后,再拧紧螺母。确保电机垂直于手臂。然后,用“T”型片上另外一个孔作导孔,在盖板上钻出一个孔。用8/32×1/2“螺栓和螺母紧固“T”型片到位。安装完的带抓取器的手臂如左图所示。
四、设计改进
事实上,手臂是不平衡的,肩部电极控制手臂到位十分困难。你可以通过重新定位肩部旋转轴或者增加平衡物或用弹簧来调整手臂平衡。但是,在你做平衡工作之前,你不要忘记在前臂末端连接上抓取器。当连接抓取器前,任何调整手臂平衡的尝试没有用处。
由于肘部电机包含在手臂内,整条手臂的重心大概在上臂的中部(至少符合模型手臂的情况,你构造的手臂或许有出入)。取出当前肩关节的长轴,用一个11/2"或2"长1/4"20的螺栓替代。在上臂的重心处新钻一个的1/4"孔,并将长轴拧入孔中。如前述方法:用1/4"20螺母,平垫圈和锯齿弹簧垫圈固定。
前臂也还未平衡,你可以通过同样的方法调整它,将肩关节装在靠近手臂中部的位置。然而不幸的是“T”型片,它有副作用:缩短了前臂的伸出长度。
一个解决办法是加长手臂以作补偿。更重量。你也可用弹簧来减轻手臂的整体承重有效的方法是:保持肘关节原位不动,在其后面附加长度。但这些方法可能会妨碍手臂或机器人的动作,所以你可以选择在手臂末端加配重来实现平衡。样机中我成功地通过一个2"×3/4"的角铁支架将两个四盎司的渔用砝码加在手臂上(见下图)。
五、位置控制
样机中肩部和肘关节的步进电机能自然地控制手臂的位置。在电子装置控制下,电机按命令旋转一定的步数,使上臂和前臂转动一定的角度。
你应该给开环伺服系统加上限位开关。这些开关提供手臂关节运动达到极限位置的指示。最常用的限位开关是小簧片开关。也可以用光电隔离器构建光学开关。用一个小的塑料或金属片来阻断发光二极管和光敏晶体管之间的光束,以此来指示运动的极限位置。你可以在一个小的钻孔的板上安装红外线发光二极管和光敏晶体管来构建光电隔离器或购买预制好的模块(它们很容易找到)。
当使用连续直流电机时,你需要提供某些类型的反馈信息来报告手臂的位置。否则,电子控制器(几乎都是计算机)无法得知手臂的位置和已经运动的距离。有几种提供反馈的方法,最常用的方法是电位器和轴增量编码器。
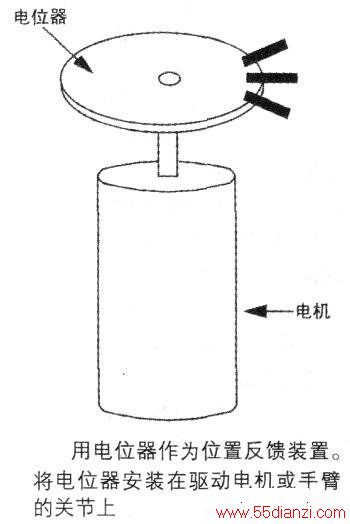
1.电位器
在肩和肘关节或电机的轴上连接电位器(见下图),用电位器电阻的变化作为手臂位置的指示。只要电位器的旋转行程与手臂内关节的旋转行程一样或更大些,任何电位器都可以使用。
否则,手臂运动会破坏电位器的内部。
在手臂系统中旋转行程通常没有问题,关节的旋转很少超过400或500。如果你设计的手臂运动超过2700,可使用多圈电位器。三圈电位器足够用了。