为机器人配置一条旋转坐标手臂
点击数:7958 次 录入时间:03-04 11:33:32 整理:http://www.55dianzi.com 机器人-智能车
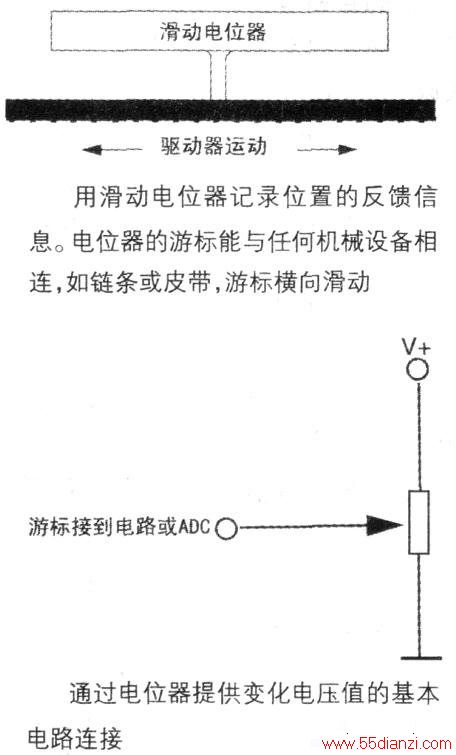
另一个办法是使用滑动电位器。
你可以通过上下移动游标来操控滑动电位器,而不是通过转动轴来控制。当你要测量直线距离时,如链条或皮带的行程(距离)时,滑动电位器是一个理想的装置。上图展示一个安装在操纵肘关节的同步齿型带夹子上的滑动电位器。电位器数值是随所连接的控制电路而改变的,而lOk到100k的电位器对大多数电路是能很好工作的。电位器能测量手臂的相对位置,但是信息是模拟信号,比如电阻和电压值,二者都不能直接被计算机理解。
按照下图所示连接好电位器,你获得一个电压输出值,该值在O到正电源电压(通常是5或12伏)之间。游标可以连接在一个模拟一数字转换器(ADC)的输入端,该转换器可将电平值转换成数字信息。
现在,在你选择ADC之前,首先应该试用一下。最新的芯片相对比较便宜并且只需极少的外部元件控制。ADC芯片最大优点是大多数带有能连接八组或更多模拟信号的接口。你可以选择把哪一组信号转换成数字信号。那意味着一个两只手臂的机器人系统的所有关节只需使用一个ADC。
为使其有效工作,ADC需要与一个微处理器或计算机相连接。你也可以使用你的个人电脑作为控制器。
同样需要注意的是一些微控制器中内部集成有ADCo譬如,NetMedia的BasICX-24提供了八个ADC输入端;OOPic微控制器提供了一对ADC输入端。上述二者都不需要在ADC输入端连接任何外部元件。
2.轴增量编码器
轴增量编码器在“与直流电机协同工作”一节中已介绍过。轴编码器是在其外缘附近有许多小孔或沟槽的圆盘。可将该圆盘连接到电机轴上或肩部或肘部关节轴上。典型的轴编码器由连接有光敏三极管的电路组成(后者有挡板阻隔外界光线)。光敏三极管记录下闪光的开/关数目,然后将此数目转换成移动距离。比如,一个闪光的开/关相当于关节的20的运动。两次闪光相当于40的运动,等等。
轴增量编码器的优点是它的输出值始终是数字信号。你可以用一台计算机,甚至一个简单的计数器电路来记录闪光开合的数目。当运动结束时,其结果就是手臂的新位置。
上一页 [1] [2]
本文关键字:机器人 手臂 机器人-智能车,电子知识资料 - 机器人-智能车






