探测物体的一种稳妥的方法就是和物体进行物理的接触。接触可能是物体探测的最常见的形式,而且通常只用简单的开关就可以实现。在这里,我们将介绍一些接触方式,其中包括“软接触”技术,使用这项技术的机器人能通过细微的接触来进行探测。
一、物理接触碰撞开关
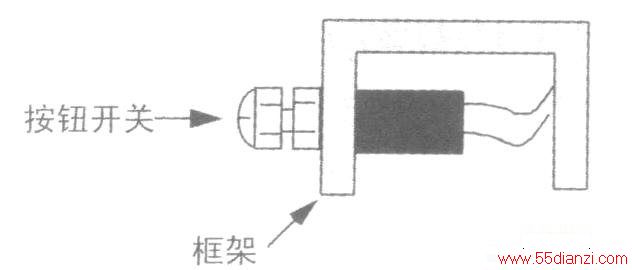
一个普通的开关就可以用来探测与物体间的物理接触了。所谓的“碰撞开关”就是安装在机器人外框上的弹簧式按钮开关,如下图。当机器人碰到了某个物体时,开关的按钮就会被按进去。显然,这个按钮应该比机器人其他部分凸出。要把这个开关安装到机器人凸出的支架上,以扩大它的接触范围。一个安装在框架上,或机器人身体上的SPST弹簧按钮开关,作为接触探测器。要实验按钮的不同形状和大小按钮式开关的表面一般都比较小。
可以在撞针的顶部贴上一小片塑料、金属、乃至一段金属丝来增大接触面积。
一片1/16英寸厚的硬塑料或者铝片都是缓冲片很好的选择。把缓冲片贴在撞针上。低造价的按钮开关的灵敏度并不十分理想。机器人可能需要花很大力气撞到物体上才能使开关有反应,对大多数应用来讲这可不是明智之举。
簧片开关却只需一点接触就可以触发。簧片开关的撞针十分小(通常称为微型开关),并且只需要运动几分之一英寸距离就闭合了。一个金属条,或簧片,附在起杠杆作用的杆上可以大大提高灵敏度。
还可以在簧片的末端安装一小片金属或者塑料来增大按钮表面积。如果簧片足够宽,你可以使用比率4/40或3/38的部件安装这个金属片。
二、触须线
我们在机器人的设计中把胡须应用在里面,实际上很有用。
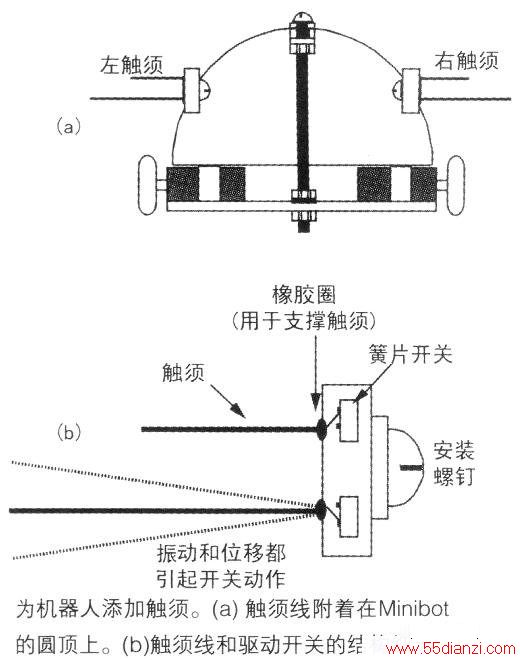
可以用20至25号的钢琴线或电炉丝来做机器人的触须。并把触须接到开关的末端,或者把触须插在一个塞孔中,用小橡胶圈固定住触须。
通过弯曲触须线,可以提高它们的功效和应用范围。商用机器人MovitWAO有两根触须,可以在所连接的开关塞孑L中旋转。当触须位置使触须的检测圈垂直时,它就可以通过探测到地形的变化从而发现类似桌子的边缘,地毯的角落等情形。
一种更为复杂的触须线的设置见下图。机器人的两侧各装两根不同长度的触须线。较长的触须线探测比机器人形体宽几寸的空间。如果较长触须线通过摩擦物体被驱动了而短线没有反应,那么机器人就明白了前方的道路是能通过的,只不过空间有点窄。
较短的触须线的长度则被截为正好可以探测与机器人形体同等宽度空间的长度。当机器人仅有一边的短触须线被触发时,机器人就会转向与该触须线相反方向以躲避障碍物。
当两边的触须线都被触发时,机器人就会明白前方的通道对于它来讲太窄了,这时它会停下来或者转向。
在安装碰撞开关或者触须线前,一定要避免大多数由机械触点开关触发的电路会发生的误操作。当开关闭合或开启时,触点总有‘抖动’的趋势;所以输入信号要加以修整。请参看前几讲中介绍的去抖动电路,其中的一些方法可以清理这样的接触,使开关能直接驱动机器人电路。
三、压电片
用导电橡胶片(用来包装互补金属氧化物半导体(CMOS)和微处理器集成电路的材料)可以制造压力传感器。这种导电橡胶就像一个电阻。用万用表测量一平方英寸的导电橡胶的两端,可以读出一个电阻数,当挤压导电橡胶时,电阻数会降低。这种导电橡胶可以成片地购买,用来做碰撞探测片最佳。RadioShack卖的一种5英寸见方的压电片就是很理想的选择。
把导线和导电橡胶片连接起来,然后把导电橡胶片贴在机器人的框架或表面上。与手指触觉不同,产生触觉时压力大小十分重要;而碰撞探测器只需了解是否与外界物体发生了碰撞。这使得接口电路比较容易构建。
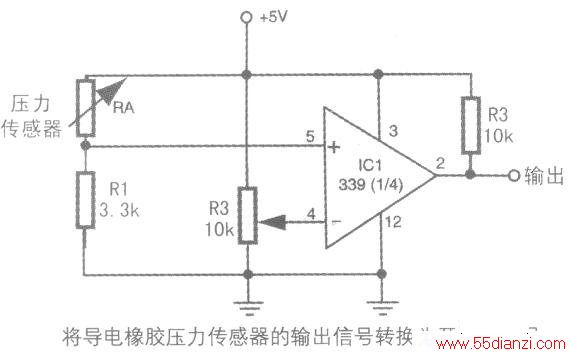
下图中给出使用导电橡胶片的比较合理的接口电路(参见下表中元件列表)。导电橡胶片和一个3.3k电阻串联在地与电源正电压之间形成了分压器。
当导电橡胶片受压时,传感器的输出端的电压就会变化。传感器的输出端就是压电片和电阻之间的一点,此信号连接到比较器339的反向输入端引脚上。
(399集成块中有4个独立的比较器,因此一个339可以同时为4个压电片服务)当压电片的电压超过了比较器的参考电压时,比较器输出状态改变,就表示碰撞发生了。
这个比较器的输出可以用来驱动一个控制马达方向的继电器上或者直接连接到一个微处理器或计算机端口上。

四、多路碰撞开关
当有许多开关或者近距离探测设备布置在机器人的周围时会怎样呢?不得不把每个开关的输出连接到电脑里,但是那样做浪费了很多外设端口。
一个比较好的解决办法是利用一个优先编码器或者多路转换器。这两个方案允许在一条公共控制线路上连接多个开关。机器人的微处理器或计算机将查询这条控制线,而不是每个开关或近距离探测设备。
1.使用优先编码器
下图中的电路使用了一块74148优先编码器集成块。
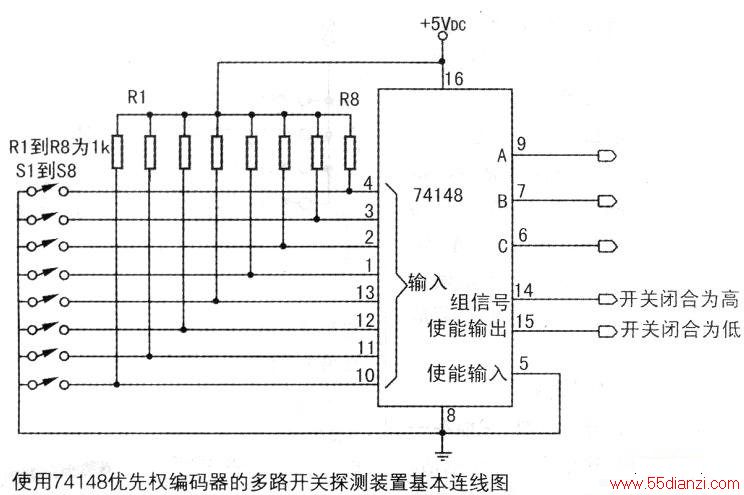

集成块的输入端就是那些开关的输出。
当一个开关闭合,相应的二进制编码就会出现在A-B-C输出引脚处。对于优先编码器,只有开关中最高的值才能在输出端显示出来。换句话说,如果开关4和7都闭合了,那么输出端只能反应引脚4闭合。
2.使用电阻分压排
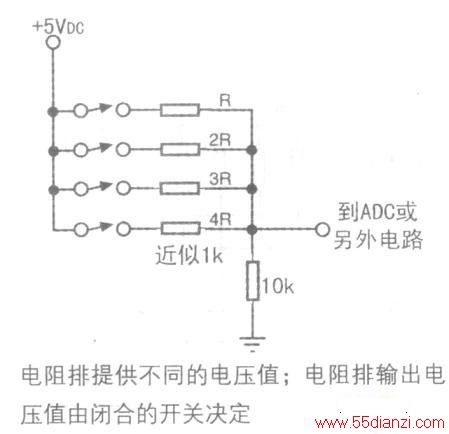
如果机器人的计算机或者微控制器中有模一数转换器(ADC)或者可以添加一个,就能以另一种技术实现多路开关接口:电阻分压排。概念十分简单,像图18所示。每个开关通过一个电阻的一端接地,而+V电压串接另一电阻到各开关上。多个开关则并行接入ADC的输入端,如图所示。这些电阻形成了一个分压器。由于每个电阻值都不同,所以当某一开关闭合时,对应的电压值都是独一无二的。
注意,由于电阻是并联的,所以一次可能有多个开关闭合。从而得到一个中间值。要对连接每个开关的电阻值进行摸索实验以获得最大的灵活性。
上一篇:机器人激光光纤“触角”






