一、如何给机器人安装激光触须线
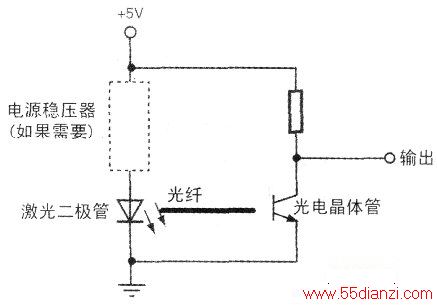
请看下图。激光射入阶跃式光纤的一端。用光纤围着机器人的前后左右绕几个圈。光纤的另一端则是一个普通光电晶体管或者光电二极管(在此仅用它做光电探测器,因而不用考虑具体型号)。当激光器打开时,光电探测器就会记录下激光的电压值,比如2.5V。这是静止电压。
当机器人身上的某些光纤圈变形时——比如机器人碰到了一个人或物体——光纤中的激光就会偏离其轨迹,这在光电探测器那一端就会使干涉图样发生变化。光电探测器检测到电压的改变,幅度并不大,可能只有1V左右。
但就是这1V不但能够判断出机器人碰到了一个物体,而且能估计出碰撞的强度。机器人与物体的接触程度越高,光纤形变越大,光到达光电探测器时的输出电压变化就越大。
一个激光光纤“触角”系统的最重要的优点是:仅通过轻似羽毛的接触就可以探测到一次碰撞。事实上,机器人可能比你先知道它撞上你了。由于与机器人的接触都是通过很细的塑料光缆,所以它弄坏或者碰伤它撞上的东西的可能性很小。只要你愿意,这些“触角”能伸到远离机器人几寸的地方并且是全方位的。这样,它就能感觉到从各方面来的接触。
下图展示的是这种技术的一个样机,它是由一个精密可见光笔形激光器,几根廉价的阶跃式光纤,和三个光电探测器组构成的。用一个小铜箍、绝缘带和捆扎带把这些光纤捆起来。然后把捆好的一边插到笔形激光器的开口处,用背面有胶水的捆扎带固定。
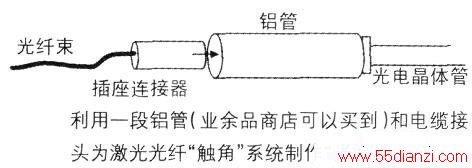
在光纤的另一端固定一个18号插塞接头。这插头本来是用于头对头连接两条18号或20号电缆的。小心地把它们固定到光纤的另一端上,这样其作用就像插头一样。
如下图,这种代用连接器再插入一个临时的“光学插座”,即直径1/4×3/8英寸的铝制管子中。管子粘在光电管的上面,光电管则被焊在样机主板的边缘部分。
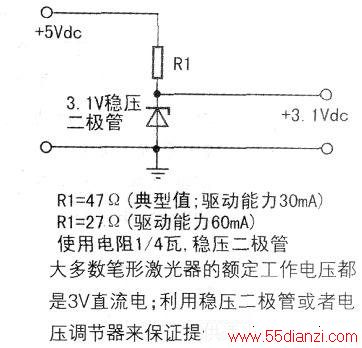
下图是笔形激光器的电源稳压器的电路图。注意齐纳二极管的稳压器。
使用的激光器是由2节AAA电池或者大约3V电压供电的。二极管激光器对高的输入电压很敏感,许多二极管在接人高于其额定值的电压时就会被击穿。
这种笔形激光器的电流消耗小于30mA。一种可选的方法是在电源正极和激光器输入端之间串联3个信号二极管,从而把5V直流电降至27至3.OV。所采用的二极管功率应该是1/4瓦特或稍高些。
二、光电探测器接口
光电管的输出信号与这个电路的外接电源范围大体相近,0-+5V。当机器人的“触须”与周围物体发生碰撞时,希望机器人能判别这些碰撞强度上的差异。如果使用计算机或微控制器来操纵机器人,就意味着你必需把探测器产生的模拟信号转换成适合机器人“大脑”的数字信号。一些比较常用的微控制器,比如BasIC X-24.OOPic,和68HC11,都有内置的模拟一数字转换口(ADC)。如果计算机或控制器没有ADC输入口,可以添加一块由ADC0809或者类似芯片组成的ADC输出板。
三、制作“触须”圈
现在我们知道,激光光纤“触须”系统并不像猫的胡须那样把末端伸出去。
尽管如此,“触须”这个词还是恰当地描述了这个系统工作方式。如果某个物体尽管仅像刷子那样轻轻的拂过“触须”,到达光电探测器的光还是会变化,机器人也就能做出相应的反应。
样机系统使用了三条“触须”,它们都被弯成了小圈,绕在测试机器人的胸前和两侧。这些圈是用小螺丝,少许胶水(绝对不能用热融胶)等固定在适当的位置的。不要把这些圈弄得太紧了。光纤圈越硬,它检测压力的能力就越低。如果圈太紧,光纤变成刚性而不是非常柔顺,就会降低这些“触角”的效力。
同时,线圈也不能太松以致在机器人运动过程中它们摇晃或者拍打。如果这样的情况发生了,那么光纤自发的摇晃和移动会导致探测器误读数据。一个直径4到6英寸的圈必须满足平均直径的光纤的硬度。所以要对你的光纤进行实验。一般光纤触角系统不需要三根独立的光纤束。一根就足够了,尤其是你的机器人比较小的时候。用三根是为了能让机器人能在三个方向(左,前,右)上独立地分辨出碰撞或接触。
上一篇:带PC机串口通讯的机器人控制系统






