QA740210可将两路正交的方波进行四倍频后产生两路加、减计数信号,送到加减计数输入双时钟可逆计数器进行加、减计数,也可直接送单片机进行数据处理。具有以下几个特点:①数字化微分电路:4路微分信号脉宽由主频周期决定,因此,是一致的,而且可在很大范围里方便地选择;②临界报警与过速报警两档速度提示:可在光栅运动速度接近极限值时给出临界报警信息,以便操作者及时控制光栅运动快慢;③在速度超过极限值时本芯片将给出出错信息;④绝对零位控制:绝对零位的设置将给操作者带来许多方便,如故障断电后的重新定位等。本芯片有“到绝对零位开始计数”和“到绝对零位停止计数”,以及“与绝对零位无关”三种工作模式;⑤片选:本电路设有片选端,可以构成多坐标数显系统。
引脚功能介绍
QA740210采用双列直插18脚塑料封装,内部框图如小图所示。
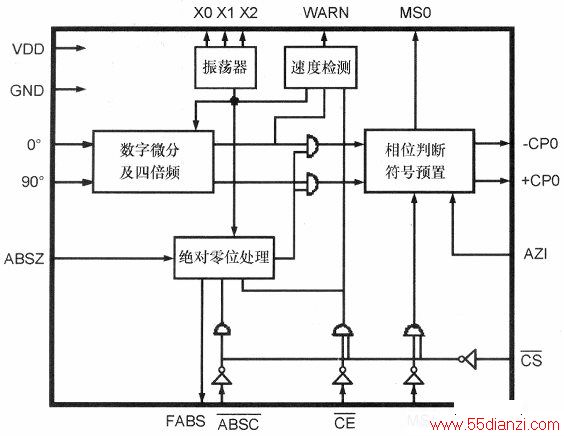
引脚功能如下:
引脚1:振荡器XO端,引脚17:振荡器X1端,引脚16:振荡器X2端,XO与×1、X2构成振荡器。引脚1还可以作为外部时钟的输入端,引脚17也可用作主频输出。
引脚2:正交信号1,Od端,接收光栅尺(或旋转编码器)传送过来的信号,这个信号应为方波。本芯片将对Od与引脚3接收的90d正交方波进行四倍频,并根据Od与90d之间的相位关系进行相位判别。引脚3:正交信号2,90d端,本引脚接收一个与引脚2在相位上相差90度的方波信号。
引脚4:减计数脉冲输出,-CPo端,此引脚常态为高电平,当有输出时,为一个与振荡器中×高电平等宽的负脉冲,此引脚应接双时钟可逆计数器的减计数时钟端。引脚5:加计数脉冲输出,+CPo端,此引脚常态为高电平,当有输出时,为一个与振荡器中×高电平等宽的负脉冲,此引脚应接双时钟可逆计数器的加计数时钟端。
引脚6:负号输出端(MSo),可指示光栅尺与设定零位的相对位置,在片选时可由MSi予置,此时MSo与Msi同电平。0d如超前90d,则当全“0”信号输入后,此端为低,90d如超前0d,则当全“0”信号输入后,此端为高,此端可直接驱动LED。
引脚7:全“0”信号输入端(AZi).此引脚接收可逆计数器传送过来的一个正脉冲信号,(宽度≥1个主频周期),它的输入使本来-CPo有输出,变成+CPo有输出。
引脚8:负号输入端(MSi),可逆计数器所显示数不为“O”的情况下,下表成立。此端在片选选中时起作用。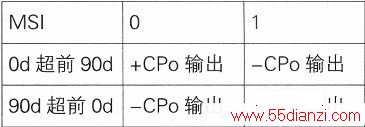
引脚10:清零输入端(/CE),清除报错信号,并使ABS功能处于A模式,此端在片选时起作用,低电平有效。
引脚11:片选输入(/CS),使电路可以用于多坐标数显表,低电平选中,/CE、/ABSC及Msi才起作用。
引脚12:绝对零位模式选择(/AB-SC),本脚需要输入一个负脉冲。片选并清零后本脚输入负脉冲的个数决定ABS的三个模式:输入0个脉冲,A模式,绝对零(ABSZ)输入不起作用:输入奇数个脉冲,B模式,绝对零(ABSZ)输入后CPo才有输出;输入偶数个脉冲,C模式,绝对零(ABSZ)输入后CPo停止输出。
引脚13:绝对零输入(ABSZ),本脚需要输入一个正脉冲。由光栅尺给出,如果一个光栅尺有若干个绝对零位输出,则只有第一个起作用。
引脚14:绝对零位标志(FABS),A模式时,FABS=1;B模式时,FABS=O;C模式时,FABS为一串脉冲(与XO同频同相)。
引脚15:速度报警输出(WARN),设本芯片主频(×2)为Fx,当Od(90d)的输入频率Fi口1/8Fx时,WARN=“O”:当1/8Fx≤Fi<1/6Fx时,WARN有正脉冲出现,宽度与Od输入的方波相同:当Fi降到1/8Fx以下后,此端自动恢复为“O”,当Fi≥1/6Fx时,WARN=“1”,此“1”电平只有当片选选中且完成清零(即/CS=O且/CE=O)后才能恢复为“0”电平。
引脚18为电源正端VDD;引脚9为接地GND端。
细分技术与四倍频电路原理
细分技术随着对测量精度要求的提高,以栅距为单位已不能满足要求,需要采取适当的措施对莫尔条纹进行细分。所谓细分就是在莫尔条纹信号变化一个周期内,发出若干个脉冲,以减少脉冲当量。如一个周期内发出n个脉冲,则可使测量精度提高n倍,而每个脉冲相当于原来栅距的1/n。由于细分后计数脉冲频率提高了n倍,因此也称n倍频,通常用的是四倍频。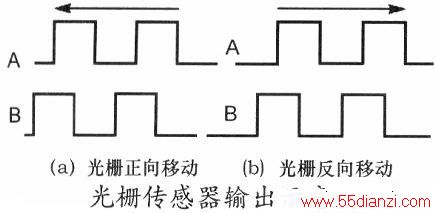
四倍频电路原理光栅传感器输出两路相位相差为900的方波信号A和B。如上图所示,用A、B两相信号的脉冲数表示光栅走过的位移量,标志光栅正向与反向移动。四倍频后的信号经计数器计数后转化为相对位置。实现计数过程一般有两种方法:一是由微处理器内部定时计数器实现;二是由可逆计数器实现对正反向脉冲的计数。
光栅信号A、B有以下关系:
①当光栅正向移动时,光栅输出的A相信号的相位超前B相900,则在一个周期内,两相信号共有4次相对变化:00-10-11-01-000这样:每发生1次变化,可逆计数器便实现1次加计数,1个周期内共可实现4次加计数,从而实现正转状态的四倍频计数。
②当光栅反向移动时,光栅输出的A相信号的相位滞后于B相信号900,则一个周期内两相信号也有4次相对变化:00-01-11-10-00。同理,如果每发生1次变化,可逆计数器便实现1次减计数,在1个周期内,共可实现4次减计数,就实现了反转状态的四倍频计数。
③当线路受到干扰或出现故障时,可能出现其他状态转换,此时计数器不进行计数操作。
QA740210在步进电机闭环系统中的硬件设计
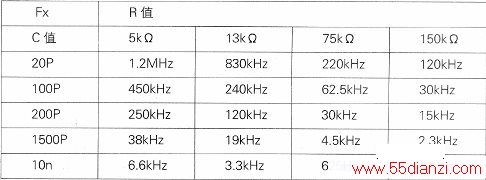
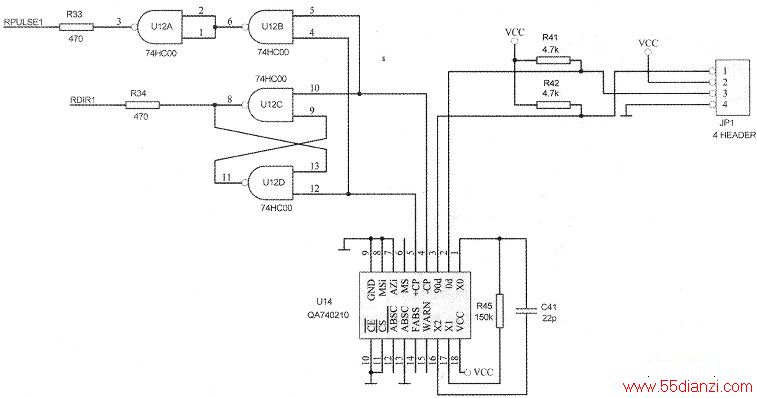
上图所示是QA740210茌步进电机闭环系统中的硬件设计原理图,Fx与R、C的关系如上表所示。1、16、17脚外接电阻R45(150k),电容C41(22p),可见图3电路Fx频率在120kHz左右。
本电路设计使加减双CP端变成了输出一路脉冲的PULSE端和代表运动方向的引R端,PULSE信号送到单片机的中断口(LPC2119的26脚,外中断INTl/PO.3),DIR信号送到单片机的I/O口(LPC2119的2脚P0.22端)。U12C和U12D组成RS触发器,由与非门组成的RS触发器复位端R和置位端S与输出端Q的逻辑关系是:S=1,R=0,则Q=0;S=0,R=1,则Q=0;R=1,S=1,则Q的状态不变;R=0,S=0,则Q的状态不定,在使用中需要禁止这种状态。U12的10脚是RS的复位端,接QA740210的4脚-CPo端,U12的12脚是RS置位端,接QA740210的5脚+CPo端。
当步进电机运传时,从旋转编码器(欧姆龙E682)给出2个相位相差90度的方波信号送到QA740210的2、3脚。当步进电机正传时,QA740210的4脚-CPo端无信号输出,输出高电平,而5脚+CPo端输出负脉冲方波信号,经过2级与非门放大得到和5脚输出一致的方波信号PULSE到单片机的外中断口。QA740210的4脚-CPo端输出高电平,使RS触发器的复位端R为高电平,U12C的8脚Q端输出高电平,即RDIR1为高电平;反之,在步进电机反转时,RDIR1为低电平,同时,得到的PULSE信号送单片机的中断口。
软件设计
步进电机在开环控制时,电机每转1圈,对于8细分,单片机需要发出1600个脉冲,对于16细分则需要3200个脉冲。使用闭环控制时,旋转编码器E682每转1圈产生,1000个方波脉冲,经过四倍频集成电路QA740210后得到4倍于旋转编码器的脉冲数量,即每圈4000个脉冲信号。此时,不管是用8细分还是16细分的步进电机驱动芯片,都是依靠旋转编码器的反馈来精确控制步进电机的运行距离的。
旋转编码器每反馈1个脉冲,经四倍频后产生4个脉冲,送到单片机外中断口,使单片机产生4次中断,我们在中断函数中根据步进电机是正传还是反转,设景一个参考点Rotation_Pulse_Num-ber=0,当步进电机正传时Rota-tion_Pulse_Number++;反之,则Rota-tion_Pulse_Number--。
当Rota-tion_Pulse_Number等于我们要运行的距离Motor_Goto_Station时(如步迸电机要转2圈,则Motor_Goto_Station=8000),则给出停止电机标志。