3 软件部分设计
在硬件电路设计制作的基础上设计了控制系统的软件。控制系统的所有源代码均在AVR Studio 4和ICCAVR集成开发环境中编译和调试。为了便于系统扩展,系统软件设计采用模块化设计。
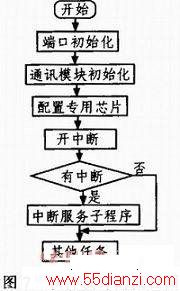
步进电机控制系统的主程序设计流程图如图7所示。
在软件设计中,由于专用控制芯片分担了不少单片机的软件设计工作,因此通信方面的软件编程是设计的重点。设计的控制系统拟作为下位机,下位机与上位机的通信选择了RS485和CAN接口。RS485接口标准只对接口的电气特性做出规定,使其具有通用性,但不涉及接插件、电缆等,在此基础上用户可以建立自己的高层通信协议。而这个高层通信协议的建立既可以采用已有的应用成熟的通信协议,比如Modbus协议等,也可以由用户自定义RS485的通信协议。本系统采用了Modbus通信协议。CAN总线节点的软件设计主要包括3大部分:CAN节点初始化、报文发送和报文接收。
CAN节点的初始化程序的主要任务就是对总线通信控制器CAN控制器进行合适的配置,以满足系统运行的要求。CAN控制器的初始化包括了工作方式的设置、ID标志符寄存器的设置、接受屏蔽寄存器的设置、波特率参数的设置、消息邮箱Mob控制寄存器的设置和中断允许寄存器的设置等。由于本文设计的步进电机控制系统采用CAN2.0B规范,需要对CAN接收器进行相应的初始化。在完成初始化配置以后,回到工作状态进行正常的通讯任务。
限于篇幅,这里仅给出CAN控制器初始化的部分程序:
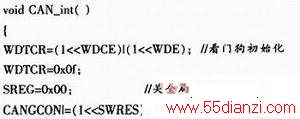

对于报文的发送,当CAN总线上的一个节点发送数据时,它以报文形式广播给网络中所有节点。当发送时,CAN控制芯片将数据进行相应的组织和传送,此时网络上其他节点处于接收状态。报文的接收主要有两种方式:中断方式和查询方式。在本设计中,采用的是中断方式,即每传来一个报文,就触发CANSTMOB中的相应中断,然后将接收到的数据从CAN数据寄存器中转移到指定的存储区域内并保存起来。
4 结束语
采用步进电机专用的运动控制芯片TMC429和驱动芯片TMC262设计了控制驱动一体化的步进电机控制系统。经过自动化生产线的实验测试表明,所设计的步进电机控制驱动一体化系统具有高细分、控制精度高和稳定性好等特点。设计的步进电机控制系统可降低软件开发的难度,减少硬件实现的成本,且控制方便。该控制系统可广泛应用于汽车行业和工业运动控制领域。






