五相混合式步进
电动机是近年技术引进仿制开发而成的新型步进电动机。由于它结构和原理上的固有特点,使它具有更加优异的性能,自然引起了本行业科技工作者的兴趣,在电动机的运行基理、工作特性、设计计算、驱动
电源及应用研究方面进行了大量的工作。为深化基理、强化概念,本文提出新的构思来描述五相混合式步进电动机的各项特性,更确切地表征它的固有特征,把握它的内在规律。
1 特殊性
这里所指的特殊性是指五相混合式步进电动机与通用步进电动机的差异。一般的步进电动机,当某相极齿下定、转子齿轴线重迭时,相邻相或相邻极下定、转子齿轴线应错开1/m齿距,m为相数,否则电动机就不能产生步进运动。五相混合式步进电动
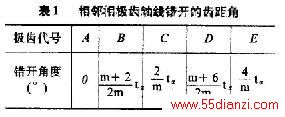
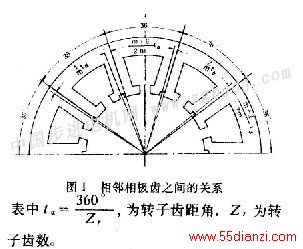
机则不然,相邻相极齿之间关系如图1所示。由图1可知,当转子齿均匀分布、A相极齿齿轴线和转子齿齿轴线重迭时,则相邻各相极齿齿轴线错开的齿距角如表1所示。
特殊性之二,一般步进电动机每相绕组产生一对极。五相混合式步进电动机虽然对称位置的极齿属于一相,但每相绕组产生二对极,因此表1中相数m含义也不一样,这里应为实际相数的二倍,即m=10。
特殊性之三,一般混合式步进电动机转子磁钢两端的铁心错开半个齿距,定子按常规规律分布。这种五相混台式步进电动机除了磁钢两侧铁心错开半个齿距外,定子铁心相邻极齿在常规分布的基础上又错开半个齿距,因此为了使线圈槽面积相同,定子铁心极齿上的小齿分布均匀而无规律。
2转矩
许多文献提到混合式
步进电机的转矩产生是线圈电流产生的磁场和磁钢产生的磁场互相作用的结果。至于这二个磁场怎样作用产生转矩叙述很少或者很肤浅,因此电磁转矩与电机各项参数之间的关系及其相互之问的影响描述得不够透彻。
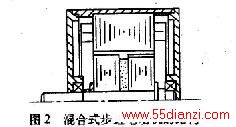
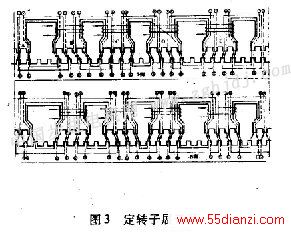
混合式步进电动机结构示图2,定子冲片见图1。铁心有十个极齿,极齿上开有小齿并套上线圈,对称位置的线圈连结成一相,通电后产生二对极,磁钢夹在转子两铁心之间,互相错开半个齿距。为说明方便起见,将图2展开一半,如图3所示,图中上面部分为磁钢的S极性侧,下面部分为磁钢的N极性侧。现设定转子齿处于图3展开的所示位置,A相极齿定转子齿轴线对齐,B、C、D、E各相齿轴线错开表1所示关系。先假设定子线圈没有通电流,此时磁钢产生的磁通路径如图3中的虚线所示,这样磁钢磁场产生的磁力如表2所示。从表2可看出,S侧的B、D极齿下转子受到向左运动的力,C、E极齿下转子受到向右运动的力。相反在N侧B、D极齿下转子受到向右运动的力,C、E极齿受到向左运动的力。由此可见,磁钢磁场产生的磁拉力,A极齿下受径向磁拉力互相抵消,B、C、D、E极齿下产生的磁拉力,在s极性侧和N极性侧方向相反互相抵消,如单纯从N极性侧或S极性侧看,B、D和C、E极齿产生的磁拉力方向相反互为抵消,因此从整个电机看各相极齿产生的磁拉力处于平衡状态,不显现转矩。

设磁钢未充磁,线圈按BC DE方式通电,则线圈电流产生的磁通路径如图3中的实线所示,各相极齿在电流磁场作用下的受力方向示表3。

同理,按表3所示关系可得出,A极齿和对应的A’圾齿上径向力抵消,B、C、D、E极齿产生的磁拉力在磁钢两侧的磁力相等,方向相反,互相抵消.可见线圈电流产生的磁场在齿层产生的磁力处于平衡状态,也不显现转矩。
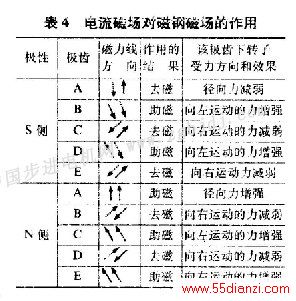
表4为线圈电流接BC DE方式通电时产生的舷场对磁钢磁场作用。
表4所示关系丧明,A相极齿磁场确增有减,在A’撅漪磁场有减有增(图3.表4均未列出,电机另外半个剖示),径问力互相抵消。在S极性侧B、D相极齿显示助磁作用,使极齿下转子向左运动力增强,C、E 相极齿显示去磁作用,使极齿下转子向右运动力减弱,结果使向左运动的力大于向右运动的力,从而产生转砸。同样在N极性侧,B、D相极齿显示去磁作用,C、E相极齿显示助磁作用,磁场作刚与S极性侧相反,但是由于磁钢二侧的转予铁心互相错开半个齿距,使极齿下转子受磁拉力的运动方向也相反,结果还是使转子向右运动力减弱,向左运动力得到增强,从而产生电磁转矩方向同S侧相同。
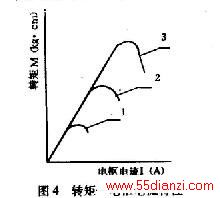
1.采用铁氧体磁钢时电枢电流与转矩的关系
2.采用铝镍钴磁钢时电枢电流与转矩的关系
3.采用稀土钻磁钢时电枢电流与转矩的关系
从以上分析可得出,线圈电流产生的径向磁场对磁钢产生的轴向磁场的作用,改变了每相极齿气隙磁场的均称分布,使极齿之问产生丁磁位蓐,这个磁位差作用于气隙基波磁导,使转子产斗.电磁转矩。从这一点讲,混合式步进电动机是基于反应力矩工作的。因此混合式步进电动饥的转矩计算可以参照反应式步进电动机方式进行。
应该指出的是径向磁场对轴向磁场在气隙部位的合成不是尖量叠加,而是算术加减。
还应持别强调指出,在计算电磁转矩时,气隙合成磁场的算术加减,只有当径向气隙磁场小于轴向磁场时才成立。如果径向气隙磁场强度超过轴向气隙磁场时。超过部分的场强不产生转矩.若仍按算术加减方法计算合成磁场来计算转矩时将产生极大的误差,这是因为超过部分的磁场在极齿下的作用相当于磁钢未充磁而定子线圈电流单独作用时的效果相同。往往磁路饱和的缘故,超过部分的场强不但不增加转矩,反而使转矩下降。其关系如图4所示。
混合式步进电动机工作基础是基于反应力矩工作的,转矩是极齿之间磁位差作用于气隙基波磁导产生的。根据磁能理论,一个极齿下的气隙磁共能为
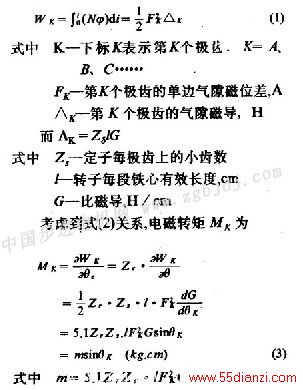
正如许多文献指出的那样,当磁钢材质和尺寸及定转子铁心确定之后,磁钢磁路的磁导不随转子位置而变化,又因径向磁场对轴向磁场电枢反应影响极小,因此磁钢工作点不受转子位置和电枢反应的波动。假定磁钢在每极齿上的气隙磁压降为Ffk且为恒

式(5)中,小括号前的负号表示反向转矩的减小,正号表示正向转矩的增加。经向磁场磁压降Fak前正号表示助磁,负号表示去磁。通常每相匝数相同,通入的额定电
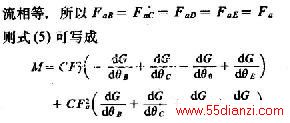
前项就是磁钢磁场单独作用时所产生的转矩,前已叙述其合成为零。后项表示电枢反应作用所产生的转矩,这样,四相通电时合成转矩为
表5为五相混合式步进电动机4—5相通电时,每相极齿齿轴线与转子齿轴线所对应的角度和变化规律。
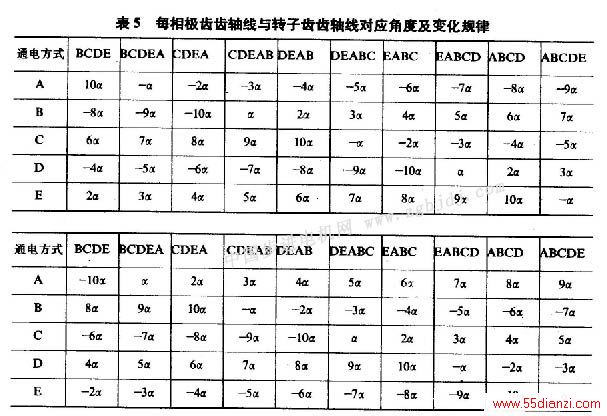
表中α为每步电角度,当4-5相运行时α=18°。将表5中任何一组四相通电方式和任何一组五相通电方式分别代入式(6)和式(7),则
四相通电时的最大静转矩为
M=3.076m (kg·cm)
五相通电时的最大静转矩为
M=3.236m(kg·cm)
由以上分析可得出以下几点:
a.混合式步进电动机的转矩是合成磁场引起的磁位差所产生的反应力矩,因此转矩表达式与反应式步进电动机完全类同。计算式中没有磁钢的磁参数,即与磁钢无直接关系。
b.电枢磁场对磁钢磁场去磁或助磁的量值由磁钢的磁参数确定,换言之磁钢的磁参数决定了电机最大静转矩的极限值,其关系示图4所示,由此可见,对于相同尺寸的电机,改变磁钢材质可以调整最大静转矩的极限值。
c.现有文献介绍的混合式步进电动机转矩计算式
[1] [2] 下一页
本文关键字:电动机 驱动电路及控制电路,单元电路 - 驱动电路及控制电路






