 不同的一相绕组通电状态产生的转矩近似地可看成是不同相位的正弦波形曲线,它们的幅值都相等。
不同的一相绕组通电状态产生的转矩近似地可看成是不同相位的正弦波形曲线,它们的幅值都相等。
 用相量表示时构成一个正十星形,如图1所示。
用相量表示时构成一个正十星形,如图1所示。
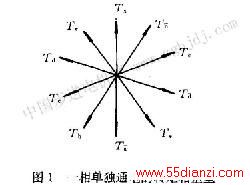 标准的或典型的通电方式,包含着一系列的通电状态,并按照一定的逻辑顺序改变,它按照产生尽可能大的转矩和均匀的步距角确定。若干相绕组同时通电时的静转矩大体上可以由每相转矩相量迭加的方式估计。很显然,图1中相邻的五个相量相加时,即五相同时通电时可获得最大的合成转矩。
标准的或典型的通电方式,包含着一系列的通电状态,并按照一定的逻辑顺序改变,它按照产生尽可能大的转矩和均匀的步距角确定。若干相绕组同时通电时的静转矩大体上可以由每相转矩相量迭加的方式估计。很显然,图1中相邻的五个相量相加时,即五相同时通电时可获得最大的合成转矩。
 图1所示相邻的四个相量相加,即四相同时通电时,可以获得接近最大的合成转矩。
图1所示相邻的四个相量相加,即四相同时通电时,可以获得接近最大的合成转矩。
 这2组合成转矩相量,分别构成2个不同的正十星形,如图2所示。表示2种五相十拍(m1=10,5—5通电和4—4通电)的整步通电方式中各种不同通电状态的转矩。相邻相量间的夹角,即整步的步距角为:
这2组合成转矩相量,分别构成2个不同的正十星形,如图2所示。表示2种五相十拍(m1=10,5—5通电和4—4通电)的整步通电方式中各种不同通电状态的转矩。相邻相量间的夹角,即整步的步距角为:
 若4—5通电,可得20种通电状态(见表1),构成五相二十拍(m1=20)的半步通电方式。图2二个转矩相量星迭加在一起,就20个转矩相量构成的新的转矩相量星形图,相邻相量间的夹角,即半步时的步距角减小到一半。
若4—5通电,可得20种通电状态(见表1),构成五相二十拍(m1=20)的半步通电方式。图2二个转矩相量星迭加在一起,就20个转矩相量构成的新的转矩相量星形图,相邻相量间的夹角,即半步时的步距角减小到一半。



 3增大步距角的通电方式
不难看出,在表1半步方式的20种通电状态中,隔1取1种状态,共有10种状态,便是整步通电方式。取第1,3,5…,19状态,是整步4—4通电方式;取第2,4,6…,20状态,则是整步5—5通电方式。
理论上,步距角小于180。(电角度)时电动机便有起动转矩,能按正确的方向旋转运动,并有一定的带负载能力。五相电动机半步方式的步距角仅为18。(电角度),增大1倍的整步方式也仅36。(电角度)。可见让步距角增大到半步方式的3、4、5、6倍等也应该是可行的。
在20种通电状态中,隔4取1种状态,便是五相五拍的通电方式(m1=5),步距角为:
3增大步距角的通电方式
不难看出,在表1半步方式的20种通电状态中,隔1取1种状态,共有10种状态,便是整步通电方式。取第1,3,5…,19状态,是整步4—4通电方式;取第2,4,6…,20状态,则是整步5—5通电方式。
理论上,步距角小于180。(电角度)时电动机便有起动转矩,能按正确的方向旋转运动,并有一定的带负载能力。五相电动机半步方式的步距角仅为18。(电角度),增大1倍的整步方式也仅36。(电角度)。可见让步距角增大到半步方式的3、4、5、6倍等也应该是可行的。
在20种通电状态中,隔4取1种状态,便是五相五拍的通电方式(m1=5),步距角为:
 取第1、5、9、13和17状态,即abcd—cd—ea一eabc—bcde—deab一abcd一,是一种五相五拍的4—4通电方式。同理若取第2、6、10、14和18状态,即abcae—c~eab—eabcd—bcdea—deabc—abcde一,便是一种五相五拍的5—5通电方式。
在20种通电状态中,隔5取1种状态,可得五相四拍的通电方式(m1=4),步距角为:
取第1、5、9、13和17状态,即abcd—cd—ea一eabc—bcde—deab一abcd一,是一种五相五拍的4—4通电方式。同理若取第2、6、10、14和18状态,即abcae—c~eab—eabcd—bcdea—deabc—abcde一,便是一种五相五拍的5—5通电方式。
在20种通电状态中,隔5取1种状态,可得五相四拍的通电方式(m1=4),步距角为:
 取第1、6、11和16状态,或第2、7、14和17状态等,都是五相四拍的4—5通电方式。
在20种通电状态中,隔3取1种状态,步距角为半步方式时的3倍。
取第1、6、11和16状态,或第2、7、14和17状态等,都是五相四拍的4—5通电方式。
在20种通电状态中,隔3取1种状态,步距角为半步方式时的3倍。
 这时稍有不同,因为20不是3的倍数,在20种状态中不能形成循环,取出的通电状
态逻辑顺序为第l,4,7,10,13,16,19,2,5,8,11,14,17,20,3,6,9,12,15,18,l,…。如果一定要说这是五相几拍,那末它应该是62/3拍,实际上是20步转过3个齿距角。
有人认为增大步距角没有必要或者没用处,既然能走小的步距角,走几个小步便等于一个大步同样可以实现。事实上不完全是这样,不妨举例说明一下。例如90BY(]52001)型电动机,它的最大静转矩为10Nm,半步方式运行时,步距角为0.09。。通过直联4ram螺矩的滚珠丝杠带动一大型工作台,无论从可靠性或精度要求的角度,转矩都足够了,脉冲当量1/μm,起动频率5k脉冲/s。可是工作台要求的运行速度甚低,不超过1k脉冲/s。对这个系统,可以选择90BYG5200A型电动机,最大静转矩2.5Nm,步距角相同,但是如让它增大步距角运行,例如五相四拍,步距角0.45。,经5:l的齿轮减速与滚珠丝杠相联,同样可以获得1肚m的脉冲当量。经齿轮减速后转矩放大速比倍,考虑减速机械的损耗也足够。增大步距角后起动频率相应下降,也能达到1k脉冲/s的要求。
可见,步距角小的通电方式,主要适合于要求频率高的系统,或要求直接驱动的系统。
对于运行速度要求甚低的系统,采用增大步距角的通电方式便可满足,且可以较小的电动机来驱动,降低成本。
4减小步距角的通电方式
标准的通电状态是从产生尽量大一些电磁转矩的观点确定的,即通常的五相通电状态和四相通电状态。对应1种五相通电状态,有2种标准的四相通电状态,例如与五相通电状态ABCDE相邻的标准四相通电状态为ABCDE和BCDE,转矩相量相互之间的夹角为18。(电角度)。如果容许少损失一点转矩,则对应于1种五相通电状态,还可以有3种非标准的四相通电状态,例如对a6cae状态,还可以有A口CDE、AB和ABC口E,相应的转矩相量如图3所示。
这时稍有不同,因为20不是3的倍数,在20种状态中不能形成循环,取出的通电状
态逻辑顺序为第l,4,7,10,13,16,19,2,5,8,11,14,17,20,3,6,9,12,15,18,l,…。如果一定要说这是五相几拍,那末它应该是62/3拍,实际上是20步转过3个齿距角。
有人认为增大步距角没有必要或者没用处,既然能走小的步距角,走几个小步便等于一个大步同样可以实现。事实上不完全是这样,不妨举例说明一下。例如90BY(]52001)型电动机,它的最大静转矩为10Nm,半步方式运行时,步距角为0.09。。通过直联4ram螺矩的滚珠丝杠带动一大型工作台,无论从可靠性或精度要求的角度,转矩都足够了,脉冲当量1/μm,起动频率5k脉冲/s。可是工作台要求的运行速度甚低,不超过1k脉冲/s。对这个系统,可以选择90BYG5200A型电动机,最大静转矩2.5Nm,步距角相同,但是如让它增大步距角运行,例如五相四拍,步距角0.45。,经5:l的齿轮减速与滚珠丝杠相联,同样可以获得1肚m的脉冲当量。经齿轮减速后转矩放大速比倍,考虑减速机械的损耗也足够。增大步距角后起动频率相应下降,也能达到1k脉冲/s的要求。
可见,步距角小的通电方式,主要适合于要求频率高的系统,或要求直接驱动的系统。
对于运行速度要求甚低的系统,采用增大步距角的通电方式便可满足,且可以较小的电动机来驱动,降低成本。
4减小步距角的通电方式
标准的通电状态是从产生尽量大一些电磁转矩的观点确定的,即通常的五相通电状态和四相通电状态。对应1种五相通电状态,有2种标准的四相通电状态,例如与五相通电状态ABCDE相邻的标准四相通电状态为ABCDE和BCDE,转矩相量相互之间的夹角为18。(电角度)。如果容许少损失一点转矩,则对应于1种五相通电状态,还可以有3种非标准的四相通电状态,例如对a6cae状态,还可以有A口CDE、AB和ABC口E,相应的转矩相量如图3所示。
 不难看出,Ag口DE和A配DE2种通电状态的合成转矩相量重合,实际上可看成是同一种通电状态,可以互相取代。ABc口E的转矩相量在ABC可口与ABC瓦E2种状态之间;A口CDE的转矩相量在ABCDE口gcDE2种状态之间。大体上可以认为把半步的步距角又分细了一次。就是说,把非标准的四相通电状态也同时采用,可以得到1种五相四十拍的通电方式(m1=40)。步距角为:
不难看出,Ag口DE和A配DE2种通电状态的合成转矩相量重合,实际上可看成是同一种通电状态,可以互相取代。ABc口E的转矩相量在ABC可口与ABC瓦E2种状态之间;A口CDE的转矩相量在ABCDE口gcDE2种状态之间。大体上可以认为把半步的步距角又分细了一次。就是说,把非标准的四相通电状态也同时采用,可以得到1种五相四十拍的通电方式(m1=40)。步距角为:
本文关键字:电动机 驱动电路及控制电路,单元电路 - 驱动电路及控制电路






