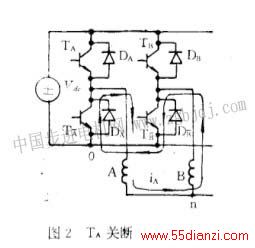
 b.TA关断时ia的正向回路。A绕组内的正向电流,经其他反向导通的相绕组及相应的功放管,再经过Dx回到A相绕组的端点形成闭合回路,如图2所示。
c.Tx丙导通时ia的反向回路。电源正端经其他正向导通的功放管及相绕组,至A相绕组,再通过Tx到电源负端。
b.TA关断时ia的正向回路。A绕组内的正向电流,经其他反向导通的相绕组及相应的功放管,再经过Dx回到A相绕组的端点形成闭合回路,如图2所示。
c.Tx丙导通时ia的反向回路。电源正端经其他正向导通的功放管及相绕组,至A相绕组,再通过Tx到电源负端。
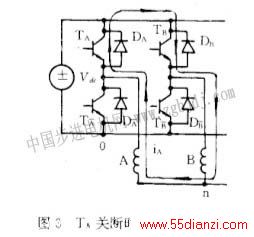
 d.Tx不导通时ia的反向回路。A绕组内的反向电流,经过DA至其他正向导通的功放管及相应的绕组形成闭合回路,如图3所示。
d.Tx不导通时ia的反向回路。A绕组内的反向电流,经过DA至其他正向导通的功放管及相应的绕组形成闭合回路,如图3所示。
 可见,对于任一相绕组,不论其相应桥臂的功放管导通与不导通,都可形成其正向电流或反向电流的回路。实际上,功放管只起到控制外加功放级电压的作用,使他能正向、反向或不加到相应相的绕组上去。对于任一相绕组,其电压方程式为:
可见,对于任一相绕组,不论其相应桥臂的功放管导通与不导通,都可形成其正向电流或反向电流的回路。实际上,功放管只起到控制外加功放级电压的作用,使他能正向、反向或不加到相应相的绕组上去。对于任一相绕组,其电压方程式为:
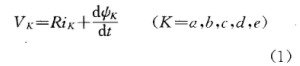
 式中VK--K相绕组的外加电压,主要与功放管的导通情况有关,是不连续函数
R-相绕组回路的电阻
iK一一相绕组的电流
ψK相绕组的总磁链
LjK时为K相绕组的自感
式中VK--K相绕组的外加电压,主要与功放管的导通情况有关,是不连续函数
R-相绕组回路的电阻
iK一一相绕组的电流
ψK相绕组的总磁链
LjK时为K相绕组的自感
 j≠K时为K相与j相绕组间的互感
j≠K时为K相与j相绕组间的互感
 UθK——K相绕组的旋转感应电压
UθK——K相绕组的旋转感应电压
 相应地,电磁转矩也可分为2个分量,即
相应地,电磁转矩也可分为2个分量,即
 式中T(1)对应于iK(1)(K=a、b、c、d、e),若忽略旋转感应电压对绕组电流波形的影响,则分析或计算所得的电流和相应的电磁转矩就是该分量,他是电磁转矩中的基本分量。T(2)对应于iK
(2) (K=a、b、c、d、e),这是对应于旋转感应电压的电流分量,由式(7)决定。从普通同步电机的理论和概念出发,就知道该转矩分量的值随转速变化的规律,他是制动转矩,相当于内部电磁阻尼[1]。
3短路转矩
转矩分量T(2)由电流分量iK
(2)决定,iK
(2)则可由式(7)解出。式(7)实际上是电机定子绕组短路运行的方程组。为简化起见,短路运行分析在下列假定条件下进行:①电机在恒转速下运行,ω=const。②旋转感应电压为正弦波形。③相绕组的自感及互感为常数。这是一种对称稳态运行,可写出其相量方程,且写出一相代表即可,例如写出A相的方程为:
式中T(1)对应于iK(1)(K=a、b、c、d、e),若忽略旋转感应电压对绕组电流波形的影响,则分析或计算所得的电流和相应的电磁转矩就是该分量,他是电磁转矩中的基本分量。T(2)对应于iK
(2) (K=a、b、c、d、e),这是对应于旋转感应电压的电流分量,由式(7)决定。从普通同步电机的理论和概念出发,就知道该转矩分量的值随转速变化的规律,他是制动转矩,相当于内部电磁阻尼[1]。
3短路转矩
转矩分量T(2)由电流分量iK
(2)决定,iK
(2)则可由式(7)解出。式(7)实际上是电机定子绕组短路运行的方程组。为简化起见,短路运行分析在下列假定条件下进行:①电机在恒转速下运行,ω=const。②旋转感应电压为正弦波形。③相绕组的自感及互感为常数。这是一种对称稳态运行,可写出其相量方程,且写出一相代表即可,例如写出A相的方程为:
 由电动机结构的对称性可知:
由电动机结构的对称性可知:
 由相电流的对称件(如图4所示)可得:
由相电流的对称件(如图4所示)可得:

 将式(11)~(13)代入式(10),得相绕组电压平衡方程式的一般表达式:
将式(11)~(13)代入式(10),得相绕组电压平衡方程式的一般表达式:
 I——相电流有效值
Uo——相绕组旋转感应电压有效值
I——相电流有效值
Uo——相绕组旋转感应电压有效值
 由式(14),短路电流为:
由式(14),短路电流为:
 短路转矩为:
短路转矩为:
 从另一个角度出发,电机的电磁转矩也可以根据绕组电流及转矩系数求出,任一相绕组电流产生的电磁转矩为:
从另一个角度出发,电机的电磁转矩也可以根据绕组电流及转矩系数求出,任一相绕组电流产生的电磁转矩为:
 总的电磁转矩:
总的电磁转矩:
 实际上转矩系数KT与旋转感应电压系数Kt相等,所以时(18)与式(21)是完全一致的。
4试验校核
被试电机是一台90BYG550A型五相混合式步进电动机,其一相绕组通电时保持转矩测试结果如图5所示。
实际上转矩系数KT与旋转感应电压系数Kt相等,所以时(18)与式(21)是完全一致的。
4试验校核
被试电机是一台90BYG550A型五相混合式步进电动机,其一相绕组通电时保持转矩测试结果如图5所示。
 从曲线上对应额定相电流(J一3A)点得保持转矩为TK=0.6lNm,其转矩系数为:
从曲线上对应额定相电流(J一3A)点得保持转矩为TK=0.6lNm,其转矩系数为:

本文关键字:电动机 驱动电路及控制电路,单元电路 - 驱动电路及控制电路
上一篇:步进电动机驱动系统的单片机控制






