 与标准的五相混合式步进电动机半步运行方式时相同。
采用新型电流型驱动器,让它的通电状态数除整步和半步方式m1=4和8以外,还可以有m1=10和20,也就是说电动机的每转步数有四种选择,为N1=200、400、500、1 000。这就是本文介绍的新型二相混合式步进电动机系统。本文对这种电动机系统的性能作了全面的研究和改善,使它达到确实可以取代五相混合式电动机的水平。
2二相电流型驱动器
电流波形控制技术主要包括参考电流波形的产生及电流的控制两大部分。参考电流一般采用微处理器或EPROM+D/A的方式产生,而电流控制目前广泛采用峰值电流型PWM控制方式。这里针对所需细分数不多的情况,采用由电阻网络分压,由模拟开关进行选择的方式来产生参考电流波形。对于20状态时,可取平衡位置,所需的两相电流波形为平衡位置角的正弦和余弦为系数再乘以幅值得到。由于正弦、余弦函数各自的对称性易见这六种波形系数组合;对于10状态运行,可取与20扶态时相比,其波形系数组合,均在20状态范畴之内。此外,对于4状态、8状态(即二相电动机整步、半步运行方式)有平衡位置与20状态相比,多增加波形系数组合sin45度,-cos45度实现4状态、8状态、10状态、20状态通电共需电流波形系数组合为七种,波形系数值为sin0度、sin18度、sin36度、sin54度、sin72度、sin90度及sin45度七种,用两组6个电阻组成串联分压网络可得到所需的波形系数值,通过两个多路模拟开关并配合以波形系数选择信号即可方便地实现所需的电流波形。至于电流的极性控制可由环分讯号参与辅助控制,完成对全H桥导通对角线的选择。
上述的极性控制方式比单纯地以一个符号(或极性)控制信号完成双极性控制具有一个较突出的优点,即当某相电流设定为零时,对于前述控制方式,由于有环分讯号参与控制,此时全H桥两对角线均截止,而对于后者则不然,仍需将实现电流与零参考电流讯号进行比较控制来达到零电流,由于比较器的零漂,往往容易造成不稳定,影响步距精度。
与标准的五相混合式步进电动机半步运行方式时相同。
采用新型电流型驱动器,让它的通电状态数除整步和半步方式m1=4和8以外,还可以有m1=10和20,也就是说电动机的每转步数有四种选择,为N1=200、400、500、1 000。这就是本文介绍的新型二相混合式步进电动机系统。本文对这种电动机系统的性能作了全面的研究和改善,使它达到确实可以取代五相混合式电动机的水平。
2二相电流型驱动器
电流波形控制技术主要包括参考电流波形的产生及电流的控制两大部分。参考电流一般采用微处理器或EPROM+D/A的方式产生,而电流控制目前广泛采用峰值电流型PWM控制方式。这里针对所需细分数不多的情况,采用由电阻网络分压,由模拟开关进行选择的方式来产生参考电流波形。对于20状态时,可取平衡位置,所需的两相电流波形为平衡位置角的正弦和余弦为系数再乘以幅值得到。由于正弦、余弦函数各自的对称性易见这六种波形系数组合;对于10状态运行,可取与20扶态时相比,其波形系数组合,均在20状态范畴之内。此外,对于4状态、8状态(即二相电动机整步、半步运行方式)有平衡位置与20状态相比,多增加波形系数组合sin45度,-cos45度实现4状态、8状态、10状态、20状态通电共需电流波形系数组合为七种,波形系数值为sin0度、sin18度、sin36度、sin54度、sin72度、sin90度及sin45度七种,用两组6个电阻组成串联分压网络可得到所需的波形系数值,通过两个多路模拟开关并配合以波形系数选择信号即可方便地实现所需的电流波形。至于电流的极性控制可由环分讯号参与辅助控制,完成对全H桥导通对角线的选择。
上述的极性控制方式比单纯地以一个符号(或极性)控制信号完成双极性控制具有一个较突出的优点,即当某相电流设定为零时,对于前述控制方式,由于有环分讯号参与控制,此时全H桥两对角线均截止,而对于后者则不然,仍需将实现电流与零参考电流讯号进行比较控制来达到零电流,由于比较器的零漂,往往容易造成不稳定,影响步距精度。
 图1所示为二相电流型驱动系统原理性示意图,对于20状态、10状态、8状态、4状态,其最小公倍数为40,因此计数器为- 40进制的计数器,配合以2位状态数选择信号,与EPROM组成环形分配器并发出电流波形选择信号。串联电阻网络产生所需6个电压值(与参考电流值相对应),对于参考电流为零,用本文所述控制方式,即此时全H桥个管子均关断,可设为任意值,故只需6个电流值。参考电流选择信号作用于模拟开关选出所需的参考电流完成给定功能。
图中Rs为绕组电流取样电阻,取样信号经电阻R和电容C进行一阶阻容滤波后,与参考电流进行PWM比较,U2为一具有置位/复位功能的D触发器。复位端R接比较器的输出,D端接环分讯号,对应全H桥一个对角线的驱动信号,时钟讯号端CLK接电流型恒频PWM的同步时钟。绕组电流一旦达到或超出参考电流,则比较器U1输出低电平,D触发器输出端Q输出低电平,从而关断功放管。关断信号一直维持到下一个斩波周期开始时刻:若此时已不再过流,则Q端重新反映D端的环分讯号状态,否则,在新的斩波周期中继续保持关断状态。要说明的是图中仅画出一相参考电流产生回路,另一相类似;图中的栅极驱动信号的控制仅对全H桥之一个对角线上的功放管的控制,而且若是上(或下)桥斩波则控制的是上(或下)桥臂,而不斩波的桥臂直接由环分讯号控制,若是上、下桥臂同时斩波,则控制的是对角线上的一对功放管。
3二相电动机新设计实例
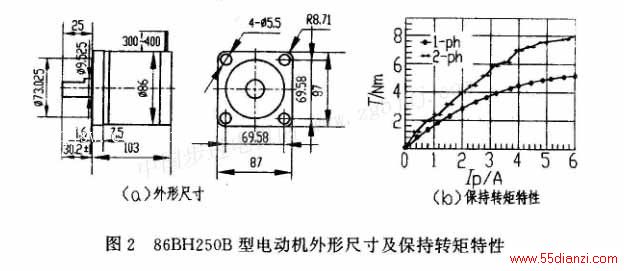
为了组成新的二相电动机系统,对二相电动机磁系统的几何尺寸比进行优化,可以获得很高的转矩一体积比[3],以86BH250B型电动机为例,它的外型尺寸及保持转矩特性如图2所示。
图1所示为二相电流型驱动系统原理性示意图,对于20状态、10状态、8状态、4状态,其最小公倍数为40,因此计数器为- 40进制的计数器,配合以2位状态数选择信号,与EPROM组成环形分配器并发出电流波形选择信号。串联电阻网络产生所需6个电压值(与参考电流值相对应),对于参考电流为零,用本文所述控制方式,即此时全H桥个管子均关断,可设为任意值,故只需6个电流值。参考电流选择信号作用于模拟开关选出所需的参考电流完成给定功能。
图中Rs为绕组电流取样电阻,取样信号经电阻R和电容C进行一阶阻容滤波后,与参考电流进行PWM比较,U2为一具有置位/复位功能的D触发器。复位端R接比较器的输出,D端接环分讯号,对应全H桥一个对角线的驱动信号,时钟讯号端CLK接电流型恒频PWM的同步时钟。绕组电流一旦达到或超出参考电流,则比较器U1输出低电平,D触发器输出端Q输出低电平,从而关断功放管。关断信号一直维持到下一个斩波周期开始时刻:若此时已不再过流,则Q端重新反映D端的环分讯号状态,否则,在新的斩波周期中继续保持关断状态。要说明的是图中仅画出一相参考电流产生回路,另一相类似;图中的栅极驱动信号的控制仅对全H桥之一个对角线上的功放管的控制,而且若是上(或下)桥斩波则控制的是上(或下)桥臂,而不斩波的桥臂直接由环分讯号控制,若是上、下桥臂同时斩波,则控制的是对角线上的一对功放管。
3二相电动机新设计实例
为了组成新的二相电动机系统,对二相电动机磁系统的几何尺寸比进行优化,可以获得很高的转矩一体积比[3],以86BH250B型电动机为例,它的外型尺寸及保持转矩特性如图2所示。
 另外针对二相电动机定位转矩大的特点,在设计时采取了消除谐波的措施,主要是4次谐波转矩的消除。该电机转子齿数,齿距角度;定子极,每极齿数,齿距角。这种不等齿距的设计使得同一定子极上各个小齿产生的电磁转矩不同相位,相邻齿转矩相位差取决于齿距角的差,相应地相邻齿电磁转矩墓波分量的相位差便,4次谐波转矩分量的相位差为a4=42,△O= 72度,可见每极5个定子小齿产生电磁转矩的4次谐波分量的合成为零,基波转矩分量的合成比它们的代数和小一些,减小的系数为:
另外针对二相电动机定位转矩大的特点,在设计时采取了消除谐波的措施,主要是4次谐波转矩的消除。该电机转子齿数,齿距角度;定子极,每极齿数,齿距角。这种不等齿距的设计使得同一定子极上各个小齿产生的电磁转矩不同相位,相邻齿转矩相位差取决于齿距角的差,相应地相邻齿电磁转矩墓波分量的相位差便,4次谐波转矩分量的相位差为a4=42,△O= 72度,可见每极5个定子小齿产生电磁转矩的4次谐波分量的合成为零,基波转矩分量的合成比它们的代数和小一些,减小的系数为:
 这种减小定位转矩的设计,其代价是损失了不到百分之10的基波转矩分量,是可以接受的。实践表明,它的运行性能比等齿距设计好得多,图3示出实测牵出特性的例子。等齿距设计的产品,定位转矩大于0. 6Nm,对运行性能产生一系列不利的影响。
这种减小定位转矩的设计,其代价是损失了不到百分之10的基波转矩分量,是可以接受的。实践表明,它的运行性能比等齿距设计好得多,图3示出实测牵出特性的例子。等齿距设计的产品,定位转矩大于0. 6Nm,对运行性能产生一系列不利的影响。
 4运行平稳性的改进步进电动机
运行平稳性可以用它的振动特性衡量[4]。二相电动机系统按照传统的通电方式时,由于分辨率低,低频振动较显著,五相电动机由于相数增多提高了分辨率,情况要好得多,成为它的主要优点之一。
4运行平稳性的改进步进电动机
运行平稳性可以用它的振动特性衡量[4]。二相电动机系统按照传统的通电方式时,由于分辨率低,低频振动较显著,五相电动机由于相数增多提高了分辨率,情况要好得多,成为它的主要优点之一。
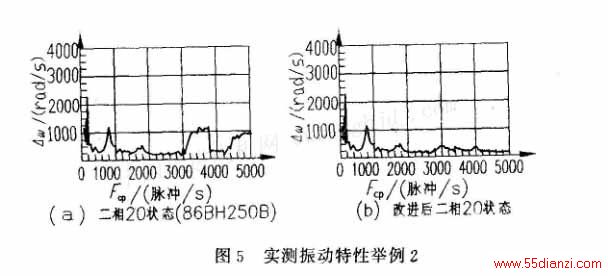
 采用电流波形控制技术,让二相电动机的分辨率提高到与五相电动机半步方式一样,每转步数N1=1 000时,低频振动特性也有明显改善,如图Sa所示。曲线表明中频段的不稳定区的振动振幅也有些减小,但仍不理想。作者的研究表明,可以从电路控制的角度进行改善,改进后测得的振动特性如图5b所示[5]。
采用电流波形控制技术,让二相电动机的分辨率提高到与五相电动机半步方式一样,每转步数N1=1 000时,低频振动特性也有明显改善,如图Sa所示。曲线表明中频段的不稳定区的振动振幅也有些减小,但仍不理想。作者的研究表明,可以从电路控制的角度进行改善,改进后测得的振动特性如图5b所示[5]。
 5结论
(l)电流型驱动技术的发展,使得二相电动机易于同时获得与五相电动机相同的分辨率,应作为新一代有宽广前景的混合式步进电动机系统来研究和发展。
(2)本文给出为这种系统设计的二相电动机实例表明,采取磁系统尺寸比优化设计和定转子不等齿距设计,可以获得大的保持转矩,小的定位转矩,良好的运行性能。
(3)二相电动机在提高分辨率状恣运行时,低频区的振动特性自然获得改善,中频段的不稳定现象也可以从控制的角度加以克眼,使运行平稳性进一步提高。
(4)_相系统由于相数少,比五相系统成本低,如果能获得与五相电动机一样的性能指标,可取代五相电动机系统,显然有很大的经济价值。同时减少了电动机和驱动器的产品的规格品种,对制造厂家和应用部门都有很重要的意义。规格品种简化、通用性提高反应了各类产品发展的共同基本规律。
5结论
(l)电流型驱动技术的发展,使得二相电动机易于同时获得与五相电动机相同的分辨率,应作为新一代有宽广前景的混合式步进电动机系统来研究和发展。
(2)本文给出为这种系统设计的二相电动机实例表明,采取磁系统尺寸比优化设计和定转子不等齿距设计,可以获得大的保持转矩,小的定位转矩,良好的运行性能。
(3)二相电动机在提高分辨率状恣运行时,低频区的振动特性自然获得改善,中频段的不稳定现象也可以从控制的角度加以克眼,使运行平稳性进一步提高。
(4)_相系统由于相数少,比五相系统成本低,如果能获得与五相电动机一样的性能指标,可取代五相电动机系统,显然有很大的经济价值。同时减少了电动机和驱动器的产品的规格品种,对制造厂家和应用部门都有很重要的意义。规格品种简化、通用性提高反应了各类产品发展的共同基本规律。本文关键字:电动机 驱动电路及控制电路,单元电路 - 驱动电路及控制电路






