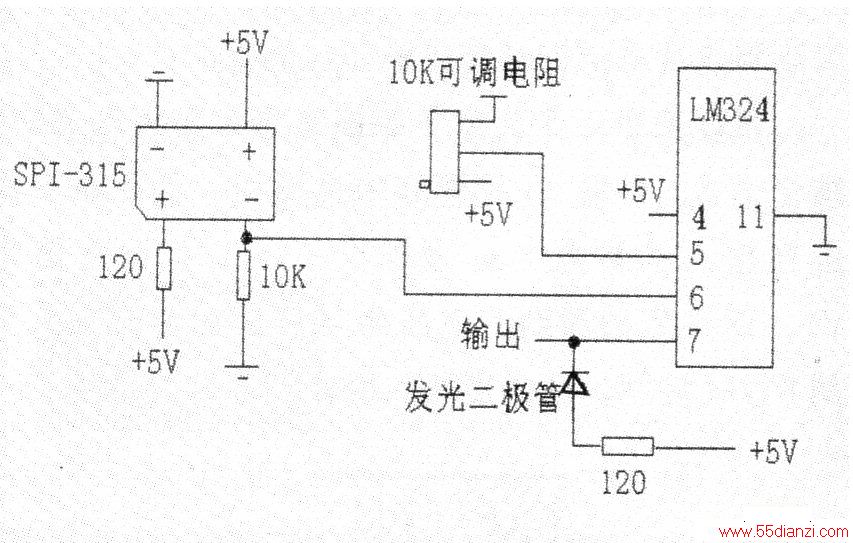
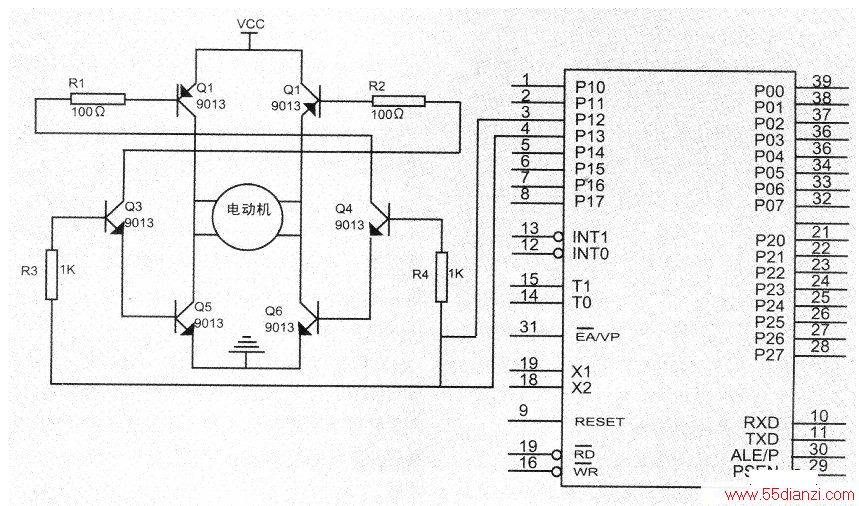
在模型车的前端安置3个光电传感器,分别置于模型车的X轴以及X轴的两侧。为了探测到道路信息,应保证每时刻不多于两个传感器同时探测到中央黑线车道。另外由于漫反射存在灰色,要使传感器能够正确判断到黑色,这里往往采用可调电阻改变输入到LM324参考信号对环境进行校正,如上图所示。AVR单片机采集从LM324输出的电压信号,根据信号通过一些算法来控制H桥电路,以控制模型车的转向,如下图所示。
如图当中央传感器探测到黑线车道时,说明车辆位于正确的位置,应该让车保持这种状态,只对后前电机输出控制信号让其加速直行,而不在给予H桥转向舵机信号;而当左侧传感器探测到信号时,说明模型车位于中央黑线道路的右侧,应给予H桥一信号使车辆向左侧转,同时在转向时应控制驱动电机的转速以降低车辆速度:当右侧传感器探测到信号时,处理原则同上。
本模型实现较为容易,但是即使是在直线车道上容易产生较大的摆头,而且当车速高时容易冲出赛道。
本文关键字:模型 机器人-智能车,电子知识资料 - 机器人-智能车
上一篇:模型车比例转向控制






