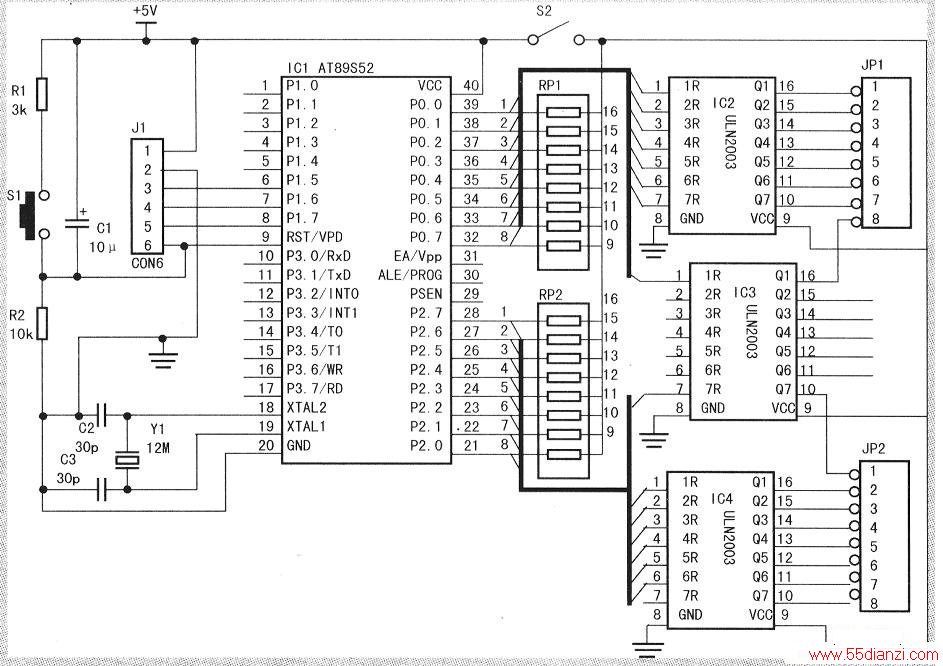
我们把小车前后轮的驱动电机都换成步进电机。再在小车的顶部伸出一只手就行了。当然了,机械手还得两个直流电机或者步进电机,为了方便准确我们都用成步进电机。步进电机我们选用20BY20H04,这是它的接线图,从上图中可以看出,电机共有四组线圈,6根引出线。把两根黑线连在一起,接电源。这样只要用开关元件(如三极管),将A、B、C、D轮流接地,能驱动步进电机运转。因其额定工作电压为45V,额定工作电流130mA,所以用开路输出的达林顿晶体管阵列集成电路(ULN2003)来作为驱动,通过P0口或者P2口来控制各线圈的接通与切断。比如依次将P2.O-P23切换为低电平,即可驱动步进电机运行。 3
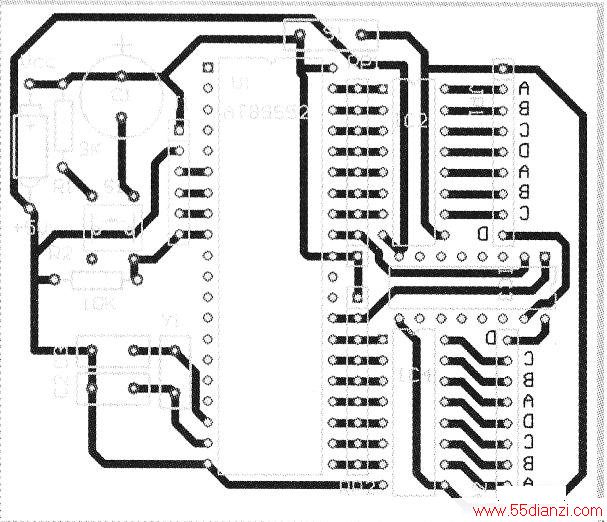
这里我们用三块ULN2003做驱动,接在P0口和P2口上,分四组驱动转向轮、主动轮、机械臂、机械爪四个步进电机。RPl、RP2是用两个排电阻做PO、P2口的上拉电阻如中图所示。下图是它的印刷电路图。

上一篇:碰壁回头车形机器人设计与制作






