一、实现方案
自制铝合金车体采用L298驱动直流减速电机实现行进,光电传感器结合寻迹算法完成电动车寻线功能。利用角度传感器的测量作为被控量,实现电动车的闭环反馈控制,根据PID控制算法找到平衡点,同时LCD显示模块实现了良好的可视化界面。我们确定的最终方案为:
1.小车模块:采用自制三角形车体结构。
2.控制模块:采用凌阳公司的SPCE061A单片机。
3.电源模块:采用锂电池结合DC-DC芯片供电。
4.电机模块:采用直流减速电机,由L298驱动。
5.测角模块:采用ZCT245AL-485角度传感器。
6.微调模块:采用舵机控制一重物在车上平滑缓慢移动来实现。
7.寻迹模块:采用反射式光电传感器。
8.计时模块:采用开2Hz中断方式。
9.显示模块:采用L-CD显示时间、路程、角度及小车状态。
10.语音模块:采用凌阳自带语音功能。
11.测距模块:采用CCD鼠标测距。
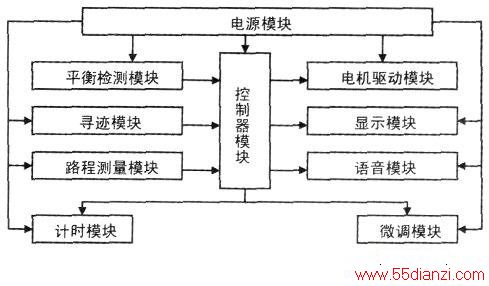
系统的结构框图如下图所示:
二、理论分析与计算
1.寻迹测量与控制
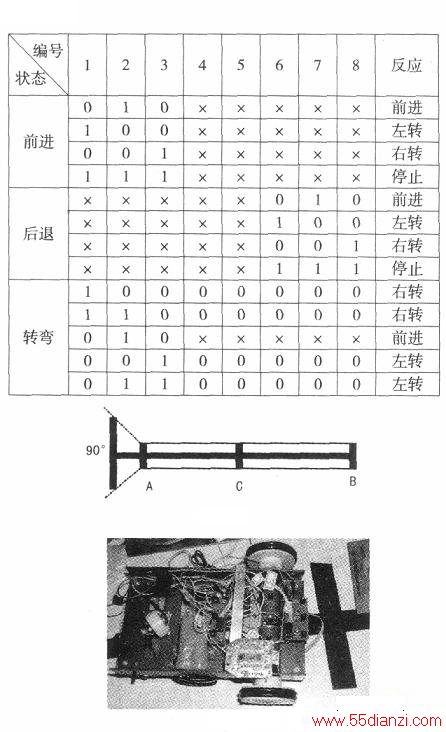
本系统中要考虑三种状态下的寻迹算法:第一,小车怎样实现自动驶上跷跷板;第二,前进过程寻迹算法;第三,逆向行驶时寻迹算法。其中,登陆跷跷板的控制最为复杂。为此,我们分别在车头、电机轴上、车尾处安装了3、2、3个对管。寻迹线的铺设完全与算法相结合。然后根据读入的对管状态值来调节小车的行驶状态。寻迹线的铺设如上图所示,对管安装如下图所示。
真值表如下表所示。
2.时间测量与计算
本系统对于时间的计量是通过开2Hz中断的形式实现的,不需要任何硬件设施。具体实现方法就是每进入一次中断,则计数值加一。通过该计数值就可方便的计算出时间。
3.平衡位置计算、寻找及判定方法
计算:设配重质量为Mp(kg),重心距离转轴Sp(m),距板面hp(m);小车重为Mc(kg),重心距板面h(cm);微调物为Mm(kg),重心距板面hm(m)旋转半径为R(m)。如下图A所示,小车的最终理论平衡点距转轴S.的计算式为:Mp.Sp=(Mc+Mm).Sc,由此可得Sc=Mp.Sp/(Mc+Mc)。但由于跷跷板存在倾角θ,使得物体重心偏移,如下图B所示。在有倾角θ情况下,力矩平衡计算式变为:Mp.g.cosθ(Sp-hp.tgθ)=Mc.g.cosθ(S'-hc.tg0)+Mm.g.cos(S’-hm.tgθ),从而可得S'=(Mp'Sp+(Mc.hc+Mm.hm-Mp'hp)'tgθ)/(Mc+Mm);到达该点后,小车再稍向前移动,跷跷板开始振荡。
寻找:由上述计算过程可知,小车在超出了理论平衡点后跷跷板开始振荡。综合分析各种常用控制算法和现有测试仪器,角度传感器的响应频率较低,在小车速度较高时、不能得到实时准确的角度值,我们在跷跷板平衡时小车重心位置前一点用黑线作了标记,以便更有效地寻找平衡点。基本部分:检测到黑线后,打开角度传感器,根据其值决定小车需移动的距离;发挥部分:检测到黑线后,小车减速,同时打开角度传感器寻找角度的突变点刹车,接着重复基本部分过程。同时考虑到有些特定情况下,小车将不适合移动,我们特别增加了步进电机带动齿条的微调装置。
根据要求计算出角度值在1.43。以内,则可判定跷跷板平衡。小车由不平衡到平衡突变的过程中,跷跷板一定是处于振荡状态的,我们将六次测量角度(干扰值滤波后)取绝对值相加再求平均,当其小于0.7。时即判定跷跷板平衡。实际应用中,这种判定方式很好地发挥了作用,在跷跷板来回小幅振荡中就可作出对平衡的准确判断。

三、电路与程序设计
电机驱动模块:一片L298N可控制两个直流电机,用PWM输出来调制车速,为了防止电机模块对前级的干扰,加了光电耦合级,电路连接如下图所示。
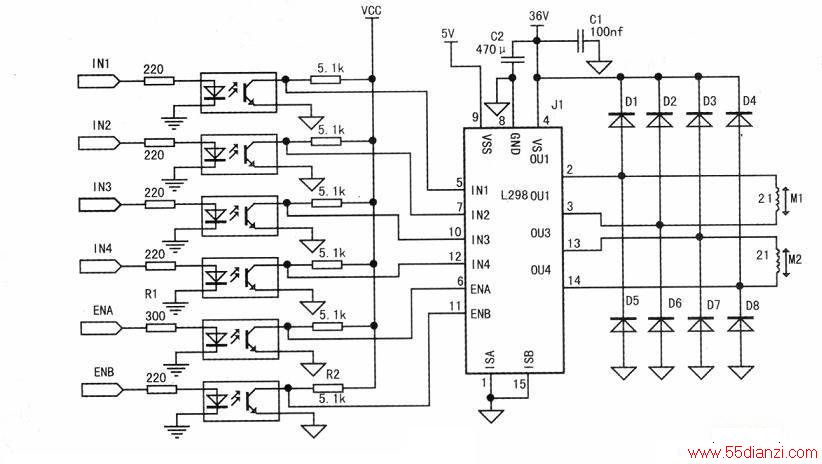
寻迹模块:我们采用反射式光电对管,其输出接比较器,由地面反射状况的不同而输出1,O信号予以反馈。其电路连接如下图所示。

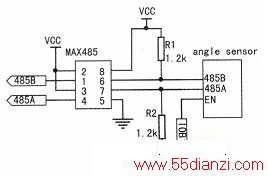
角度传感器模块:ZCT245AL-485角度传感器为485接口,故应将其先与485转换电路连接,然后再与单片机相连。电路连接如下图所示。
显示模块:采用LCD的串口模式来显示小车状态、时间、路程和角度。
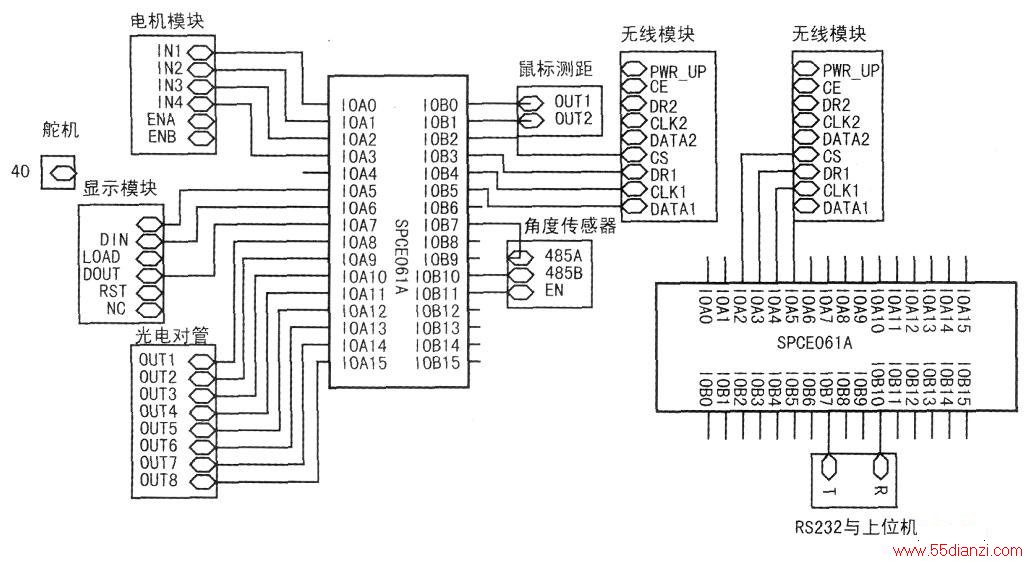
四、总体电路图
单元电路确定后,对单片机端口进行了合理的分配,整个系统的总体电路如下图所示。
五、软件设计与工作流程图
因为小车要进行前进、平衡调节、延时、语音播报、后退等一系列活动,所以对于程序的安排结构要求严格。在此,采用模块化设计方法,将整个程序分为以下几个模块:主程序;电机驱动子程序;寻找平衡点子程序;上线子程序;LCD显示子程序;角度传感器子程序等。






