2.控制方法
(1)电机的控制
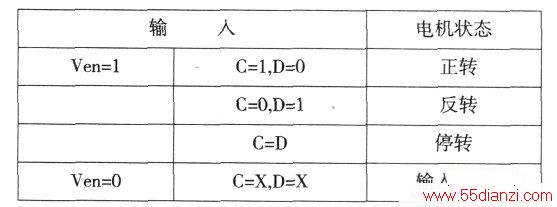
根据下表,可利用凌阳单片机的五个端口来控制电机。其中四个端口分为两组去分别控制两个电机的正反转和停转,使两侧电机一正一反转动即可实现小车的左右转弯,此法控制的小车转弯能力极强,可以原地转过任意角度,使小车的机动性能大大提高。其余一个端口输出PWM信号接在两电机在L298N上所对应的使能引脚6和9来控制电机的转速。凌阳单片机可输出占空比和频率均可调的PWM信号。其占空比从1/16到14/16分为14档,以此可方便地控制电机转速。
(2)跷跷板倾角的控制
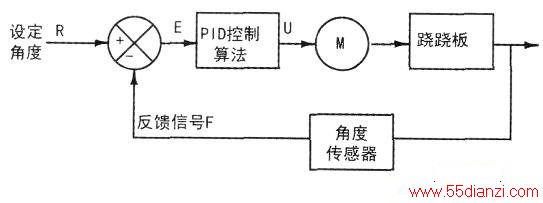
对跷跷板倾角的控制我们采用闭环反馈的方法,以满足题目对控制精度的高要求。下图是闭环反馈的示意图,角度传感器实时采样跷跷板的倾角D送人单片机与预先设定值进行比较得出角度偏差E。单片机对E经过简单的PID控制算法得出对电机动作的适当方案U,该方案通过小车作用于跷跷板以使其倾角恢复或保持在题目要求的范围内,即使角D满足IDI≤1.4度。
三、程序设计
1.软件设计思想
针对本系统中角度传感器采样较慢,控制对象跷跷板惯性大、滞后大的特点,我们选用了增量式按偏差的比例、积分、微分进行控制,即增量式数字PID控制。
其算式为:
△u(kT)=Kp[e(kT)-e(kT-T)]+Kie(kT)+Kd[e(kT)-2e(kT-T)+e(kT-2T)]
其中Kp、Ki、Kd分别表示比例系数、积分系数和微分系数。该算法无需累加,控制增量的确定仅与最近三次的采样值有关,较容易通过加权处理获得比较好的控制效果。
比例控制P是一种最简单的控制规律,其控制作用大小与偏差的大小成正比,调节迅速。但对于大多数惯性环节,Kp太大会引起自激振荡并且仅使用比例控制无法消除静差。积分控制可以弥补单纯比例控制的不足,消除系统的静态误差,因为只要存在偏差,积分控制的输出总是用来减小静态误差,直到偏差为零、积分作用才停止。系统采用比例积分控制即PI控制可以消除静态误差,但是系统的超调很大,调节时间很长。
为改善动态性能还必须引入微分校正D,微分的控制作用与偏差的变化率有关,偏差变化率越大其调节作用越强。微分控制可以预测偏差,产生超前的校正作用,改善系统的动态性能。结合上述三种控制方法,并通过试验不断地对相应参数做出调整,最后由此编出的软件拥有很强的适应能力,对控制对象的控制相当精确、快速。
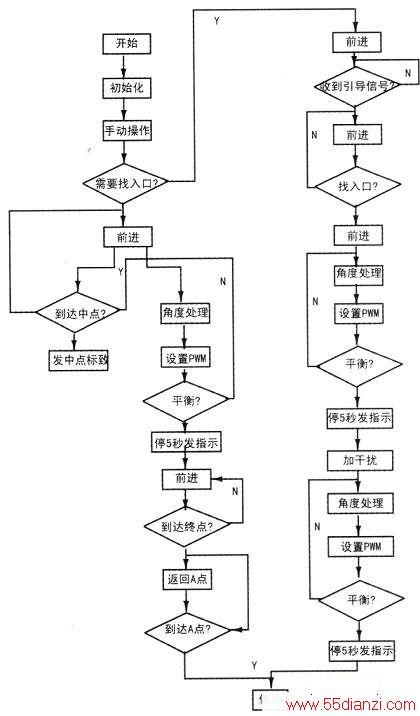
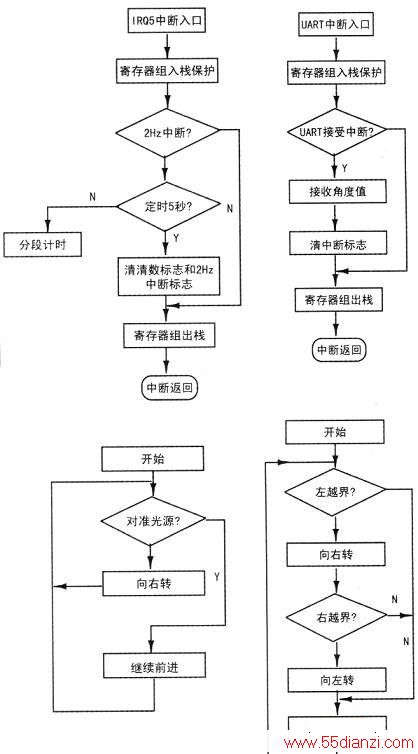
2.工作流程图
上一篇:超声波的移动机器人导航的设计案例






