一、系统方案
1.实现方法
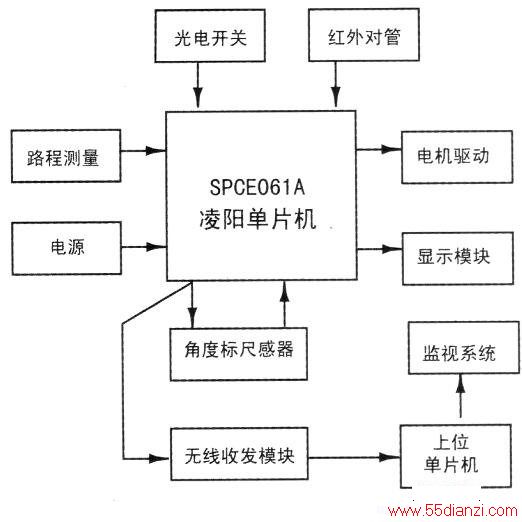
考虑到稳定性和爬坡能力,选择玩具坦克作为小车的主体。车前安装红外光电开关以接收引导信号,安装红外反射对管用以在跷跷板上寻迹前进。角度传感器安装在坦克底盘的中心平面上用以检测跷跷板的状态。车的后部安装了以CH451驱动的8位数码管来显示坦克的行驶路程和时间。对双电机的驱动我们使用了专用芯片1298N,保证了驱动的可靠性和精确性。微控制器采用凌阳单片机。电源部分采用7.2V大功率镉镍电池组,经LM7806稳压后为双电机供电,经LM7805稳压后为单片机和其它模块供电。无线收发模块用以向远处的监视平台实时发送小车与跷跷板的状态信息。系统方框如下图所示。
2.方案论证与设计
(1)微控制器的选择
采用凌阳16位单片机SPCE061A进行控制。
SPCE061A内部集成7路10位ADC和2通道10位DAC,可以直接用于电压测量时的数据采集,以及数字控制输出及语音输出;I/O口资源丰富,可以直接完成对键盘输入和显示输出的控制;存储空间大,能配合LCD液晶显示的字模数据存储。采用SPCE061A单片机,能将相当一部分外围器件结合到一起,使用方便,抗干扰性能提高。
(2)车架的选择与设计
本设计对车速要求不高,而对稳定性、精确度、平衡能力及爬坡能力要求较高。玩具坦克兼具以上各项优势,故此选作小车底盘。为了方便各个模块的安装将原车的炮塔拆去、只保留底盘和电机。为了测量行驶里程的方便,在坦克一侧的主动轮上均匀粘贴四片小磁钢,通过单片机对霍尔开关输出脉冲的计数完成对路程的精确测量。
(3)电源的选择与设计
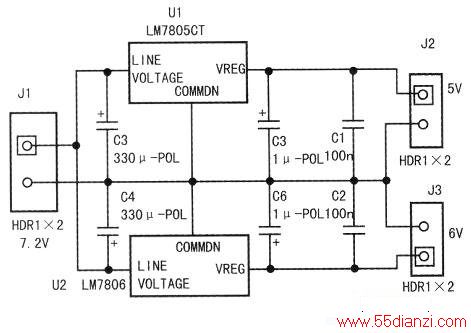
本系统要求6V和5V两种电压供电,故选用7.2V大功率镉镍电池组,经由LM7805及LM7806输出5V和6V电压、分别为电机和单片机供电,实现了控制电路电源和电动机电源隔离,避免了由单电源供电时、电机起停产生的大电流对单片机和其它模块的影响。如下图所示。
(4)电机及其驱动芯片的选择与设计
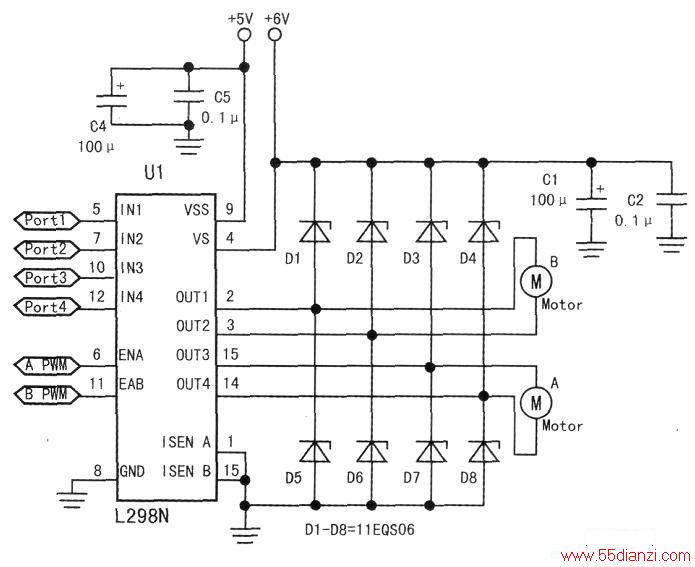
本车采用原车自带的双直流减速电机,仅需6V即能可靠工作。电机的驱动选用专用驱动芯片L298N,该芯片可分别独立控制两路电机的起停和转向,保证两路电机参数的对称,有利于保持坦克行驶的稳定性和精确性,也降低了电路的设计难度。电机驱动电路如下图所示。用单片机的五个端口给出PWM信号和控制信号即可实现直行、转弯、加减速、后退等动作。
(5)显示模块的选择与设计
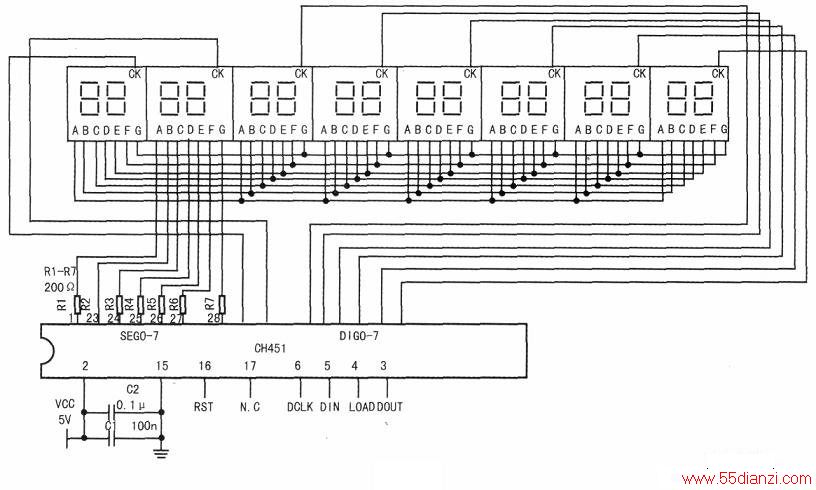
根据要求,只需显示小车在跷跷板上行驶的时间和距离,显示内容较少且均为数字,故选用了相对于点阵式液晶显示器造价低很多的数码管。其中五位用以显示路程,余下的三位用来显示行驶时间。八位数码管采用专用键盘显示管理芯片CH451驱动。显示模块电路如下图所示。CH451的SEGO~SEC7分别控制数码管的8个段,DIGO~ DIC7用于选通各个数码管进行动态显示。单片机仅用三个端口即可完成8位数字的动态显示。而对于监视平台我们选择点阵式液晶显示器,与数码管比较其优势在于:显示内容更加丰富,人机界面更加友好,监视人员易于取得信息。
(6)引导和寻迹模块的选择与设计
为引导小车准确驶上跷跷板,在跷跷板的一端安装一只具有广角发射能力的红外发射器,在小车的前端安装一只红外反射开关的接收管以接收广角红外发射器发出的引导信号。在车的前端底部安装红外反射对管以检测跷跷板上的黑色轨迹以循迹前进。在车的后端也安装有红外反射对管以用于倒车时的寻迹。
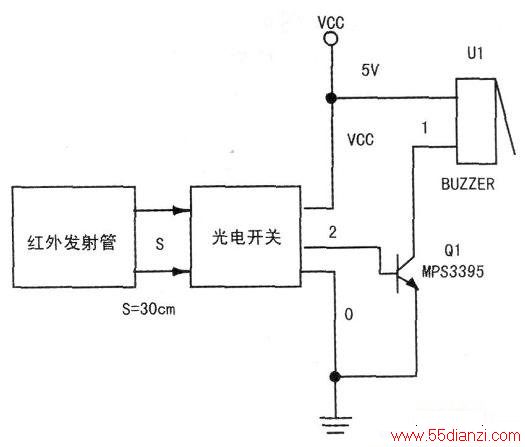
下图为引导小车驶上跷跷板所用引导电路。大功率红外发射管发出的红外光可以保证小车前端的光电开关在30cm以外准确地接收到。一旦光电开关接收到红外信号便在其输出端输出高电平,使三极管导通驱动蜂鸣器发出声响。同时单片机通过采样光电开关的电平便可得知光电开关的状态、再控制电机做出相应的动作,使小车沿着红外光引导的方向前进并准确驶上跷跷板,继续在跷跷板上寻迹前进。
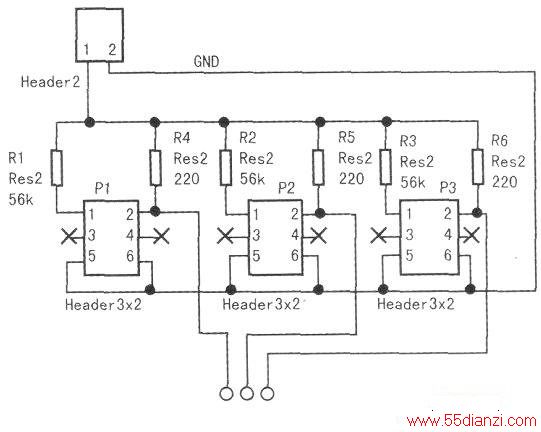
沿跷跷板的中间线铺设一条黑胶带,由于黑胶带与其两旁的木板对红外线的反射率相差很大,故安装在车前端的反射式红外传感器在检测到黑胶带和木板表面时输出高低不同的电压,这些电压信号通过凌阳单片机自身集成的7通道10位模一数转换器(ADC)进入控制器与事先设定的临界值比较,把电压转换为高低电平。再通过一定的控制算法区分黑胶带和木板,使小车沿黑胶带前进和倒退,其电路图如下图所示。
(7)角度传感器的选择与设计
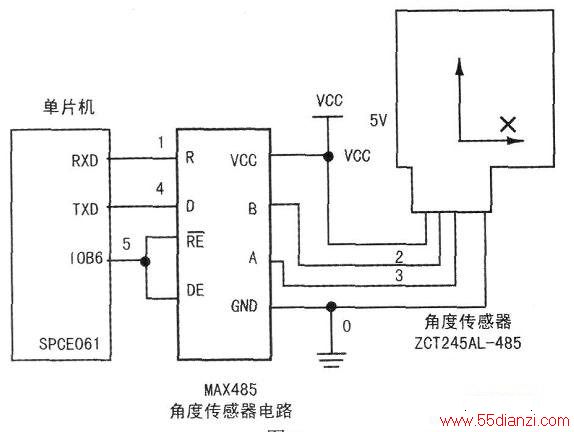
为了控制小车在跷跷板上的进退和停止,必须对跷跷板与水平面之间的角度进行测量。我们选用双轴倾角传感器ZCT245AL-485来测量角度,其测角范围为-450到+450,输出采用半双工通信方式并采用RS485通信协议,具有零点设置、波特率调整等功能。其分辨率为O.l。,重复性好,工作电压为5V非常适合本系统的要求。ZCT245AL-485普通型双轴倾角传感器直接通过RS-485总线输出两轴与水平面之间的夹角。将角度传感器固定在车底盘的水平面上,使其X轴与车的宽度方向平行,Y轴与车的长度方向即车的前进方向平行。这样,当车爬坡时Y轴输出正的角度,X轴输出O;下坡时Y轴输出负角度,X轴输出O。单片机通过检测Y轴输出角度即可获知小车的位置和跷跷板的状态,然后控制小车的进退以保持跷跷板的平衡。其RS-485通信电路如下图所示:角度传感器的输出经由转换器MAX485转换为标准电平后与单片机进行串行通信,实时读出小车的倾斜状态并由此控制小车的动作以控制跷跷板的倾角。
(8)无线收发模块的选择与设计
我们为系统增加了与另一单片机无线通信的功能,该功能的实现赖于无线收发模块PT2262/2272。其中PT2262将载波振荡器、编码器、发射单元集成于一体,使发射电路变得非常简洁。接收芯片PT2272LA是非锁存型4位数据输出,有8位地址编码,有效地防止r各个无线模块之间的相互干扰。在我们的设计中小车上的单片机通过PT2262向监视单片机实时发送诸如“启动”、“停止”、“平衡”等状态信息,监视单片机通过PI2272接收这些信息并通过液晶屏显示和喇叭发声将信息传递给选手,使选手可以对小车和跷跷板的状态进行远距离监视。
(9)跷跷板的设计
跷跷板是本设计的关键,我们采用高强度复合板主体加铝合金边框的结构防止其变形,并加装了必要的减震装置来增强其抗干扰能力。
二、理论分析与计算
1.理论计算
(1)平衡时角度控制范围的计算根据题目要求ldA-dBl≤40mm,故在下图中水平面H与跷跷板平面之间的夹角D度数的绝对值IDI≤arcsin(ldA-dBI/IABl)=1.432度。由于所用角度传感器能分辨的最小角度为0.1度,故必须控制小车使角D的度数小于+1.4且大于-1.4。

当D≥+1.4度时控制小车前进,当D≤-1.4度时控制小车后退,以此来调节整个系统的重心,恢复和保持跷跷板的平衡。
(2)路程的计算
上一篇:超声波的移动机器人导航的设计案例






