1 引言
并联机构是由多个并行链构成的闭环机械系统。相对于串联机构, 由于它的驱动设备安装在固定地点, 位置而不随末端执行点的运动而改变, 由此可带来高速、高精度的运动。并联机构具有刚度大、无关节误差积累和放大、位置反解容易等优点, 与串联机构在应用上形成了互补关系。目前, 对并联机器人研究较多的是6 自由度( 6DOF) 并联机器人, 但在某些场合2~5 个自由度即可满足使用要求, 这类少于6 自由度的并联机器人被称为少自由度并联机器人。少自由度并联机器人由于其驱动元件少、造价低、结构紧凑而有较高的实用价值。
在研发的5 自由度并联推拿机器人及其位置分析的基础上, 以微机、PCI 总线控制卡、PCI 总线数据采集卡为硬件基础,利用VC++6.0 设计机器人控制界面, 实现该机构的连续轨迹运动。
2 新型五自由度并联机器人机构原理
研究的并联机构如图1 所示。A1~A4、B1~B4 为球副, R1~R8 为转动副, L1~L4 为电动推杆, 实现伸缩运动。A1A2A3A4 组成了静平台, B1B2B3B4 为动平台。
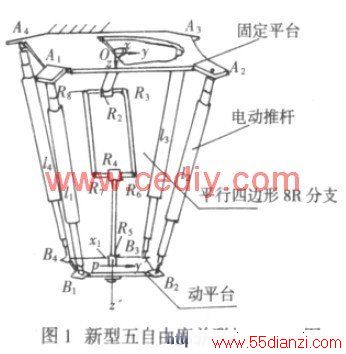
其中, 在机器人系统中, 四根电动推杆L1~L4 和中间的转动副( O) 为主动输入, 这样动平台相对于静平台就有五个自由度,相应的控制量为: 位移量l1、l2、l3、l4 及转角。工作时控制驱动关节使工件在三维空间进行移动或转动, 从而实现了动平台的运动。
3 控制系统的硬件组成
并联机构的控制系统组成如图2 所示, 该系统由微机、PCI总线测控卡、无刷直流电机及其驱动器、位移传感器等组成。







