从功能上讲,软盘驱动器由机械结构和控制电路两部分组成。而机械结构部分是由盘片驱动系统、磁头定位系统组成,控制电路部分则是由数据读写抹电路系统和状态检测系统组成。
2.1盘片驱动系统一它由一个+12V的直流电机驱动,带动盘片以300转/分的恒速旋转。
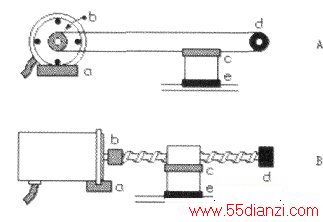
对于磁头定位系统,5.25英寸软盘驱动器采用的是一+12V的四相双拍步进电机,由步进电机带动磁头小车沿磁盘半径方向作径向直线运动。而3.5英寸软盘驱动器则采用的是一+5V的双相单拍锣杆式步进电机,由步进电机通过蜗轮锣杆带动磁头小车沿磁盘半径方向作径向直线运动。当从适配器接口送来的“方向”和“步进”控制脉冲后,驱动步进电机使磁头定位到需寻址的磁道和扇区进行相关操作。如下图中的A和B所示:
如何控制驱动器电机呢?最实用的是利用微机的并行接口(即打印机接口LPT)来进行,这是因为PC机软件丰富、并行接口可操作性强且简单方便。方案调试验证后,再行定制线路板不迟。该接口(LPT)是一个D型25针的孔形端子,其内部又由数据口、控制口、状态口三部分组成:一个8位的数据输出口,一个4位的集电极开路门控制口和一个5位输入状态口,使用三个8位输出锁存/输入缓冲器,它们分别占用r三个I/O端口,通过对它们进行读写操作并送入触发器,实现数据输出和控制信号的输入输出。LPT的具体管脚分配情况如下表所示:
数据地址口(读/写,port_address=&h278or &h378 or &h3BC)
并行控制口(读/写,port_adress=&h279or&h379or&h37A)
状态端口(读,port_address=&h27Aor&h37Aor&h3BE)
读写磁头控制的双相单拍锣杆式步进电机和盘片驱动电机基于LPT的控制电路如下图所示:
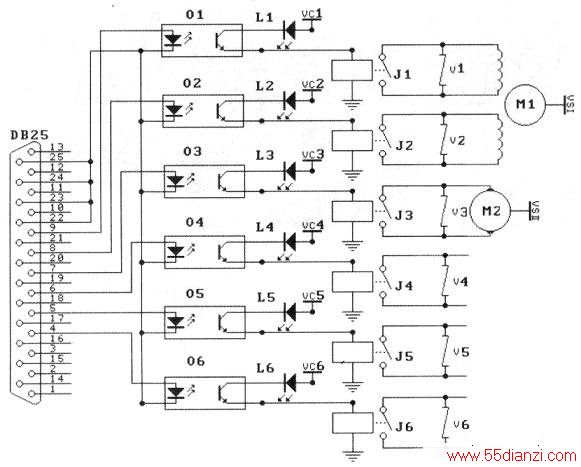
图中的光电耦合器除了是为了保护微机LPT接口外,还可用于电机控制、A.C电源控制等工业控制逻辑等。基本参数:最小冲击隔离电压7500V;LED最小触发电流5mA;最小峰值阻断电压250V。L1~L6为状态指示的LED兼有保护作用,V1~V6为压敏电阻,是防止瞬态电压、保护继电器的一种方法。LPT口的基本配置町同时控制六台双相单拍锣杆式步进电机或12台单相驱动电机,若加以扩展还可控制更多的设备。
编程方法
LPT的编程可由两类I/O指令操作,一类为输入指令(in),另一类为输出指令(out)。操作时,输出指令把数据送入两个触发器,触发器的输出连至计算机LPT的D型连接器;输入指令则读取上述两个触发器的内容;第三个触发器允许微机渎状态端口的状态。
以双相单拍正转锣杆式步进电机为例:其工作状态为:A→B→A→B……。即按A、B、A、B……的顺序循环通电,使步进电机正转。其相序位控状态字如下表所示,

根据这一思路,可以编写出相应的控制软件来。编程采用的语言也是多种多样的,如以下几种常用的:
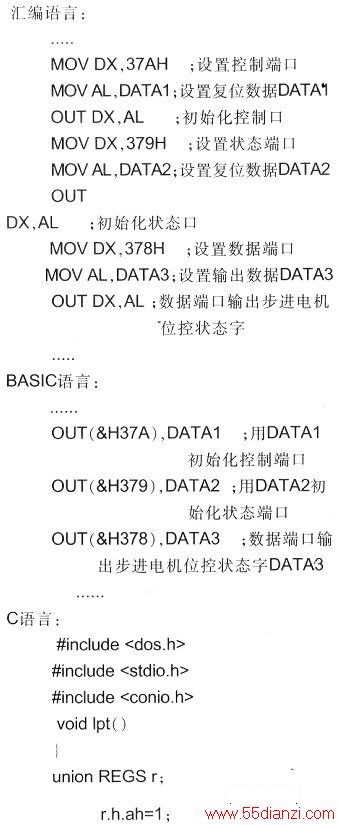
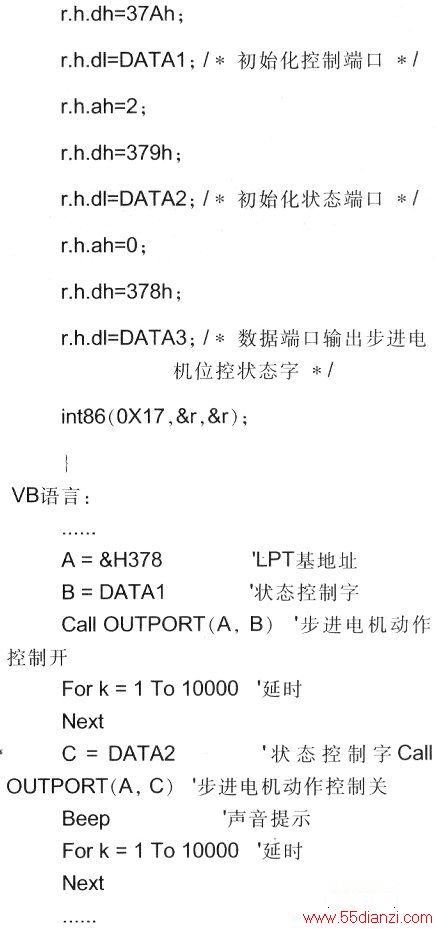
需要说明的是由于VB不具备访问机器硬件的功能,因此,在这里是通过调用动态库(DynamICLinking Library)的方法来实现的。






