以美国主站坦克M1A1的运动性能为目标,阐述了一种坦克兵动态训练模拟器液压控制部分的设计流程。该模拟器采用嵌入式控制器控制液压系统,克服了模拟控制系统难以保证长期可靠运行的缺点,也克服了一般数字控制系统难以保证三路油缸运动的实时性和同步性的缺点,且比一般的三自由度复杂运算控制器的体积小。实用效果表明,该训练模拟器操作简便,运行稳定,较好地满足了坦克兵模拟动态训练的要求。这里研制的数字液压控制装置系统给其他类型的动态模拟训练器的研究提供了参考。
长期以来,坦克手的培训都是利用真实的坦克和场地进行的,这样的训练尽管具有实地演练优势,但是坦克行进路线和路况少,耗油量大。坦克兵动态训练模拟器正是为了弥补实地演练的一些缺点,辅助培训坦克驾驶员而设计的。本文以美国战后第三代主站坦克M1A1艾布拉姆斯坦克为目标,介绍了一种坦克兵动态训练模拟器液压控制部分的设计流程。为了增加模拟训练的真实感,模拟器采用高性能嵌入式控制系统实现液压系统的控制,增加训练模拟器的动作实时性和地面多种行驶姿态,并利用三个液压缸支撑一个平面的设计,形成三自由度的运动姿态模拟。
模拟训练器的液压伺服系统如果采用模拟系统,其响应快,但由于参数调整非常难,自适应性差,以及参数漂移等问题使得模拟系统难以保证长期可靠运行。用数字系统代替模拟系统的难点在于三路油缸的实时和同步控制。本文设计了一种嵌入式控制器——嵌入式平板电脑ZY-100作为人机界面和控制器,以期实现液压伺服系统的可靠性和实时性要求。三自由度控制的复杂运算采用烟台中宇航空液压有限公司的嵌入式控制器完成,实现计算机、PLC和触摸屏显三合一,这样使集成化高、连线少、体积小、厚度只有20 cm,而一般的三自由度控制器都比较厚,虽然嵌入式液压控制研究已有许多在国内外公开发表的文章,但具有如此小体积、高集成化、三自由度复杂运算的控制器在国内期刊上鲜见发表。
1 动态训练模拟器的工作原理
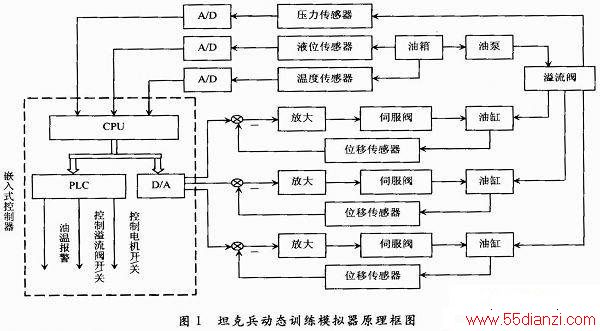
坦克兵动态训练模拟器液压部分是由三个液压伺服缸支撑一个平面,使其能形成三自由度的运动,以模拟坦克在不同的地面上的行驶姿态。其中,三个油缸的运动轨迹由用户在人机界面预先设置,计算机产生三路数字电压信号,分别经过D/A变换、放大,转换成电流信号去控制三个伺服阀的开度和方向,从而独立控制三个油缸的运动方向和速度,使底部的三路油缸控制顶部平台做三自由度的运动。为了能够正确调整油缸的移动,通过与油缸相连的位移传感器的反馈信号构成各自由度位置闭环控制,将油缸位移电压信号与计算机输出信号比较,然后根据差值信号,纠正油缸移动的实际位置。因此,位移传感器输出的是负反馈信号。本文计算机经D/A转换后的输出电压为0~10 V。开路状态下,D/A转换后的输出电压0~10 V对应油缸移动距离0~200 ms,且D/A输出与油缸移动距离成正比;位移传感器的输出为0~10 V,对应油缸0~200ms的移动距离,且与油缸移动距离成正比。
为保证油的顺利流动和油泵的正常工作,在油箱里油泵到油缸的通道中设置了人工控制溢流阀。溢流阀中的油压及油泵中的液位将通过压力传感器和液位传感器送到计算机实时监控。如果发现油压过高或过低,通过旋转溢流阀开关,可以改变输油管管口的大小,调整油压,使油压满足正常工作要求。如果液面过低,计算机将产生报警信号,同时送出关机信号,关掉油泵驱动电机。
另外,油温的范围也会影响油泵的正常工作,系统通过油箱中的温度传感器提取温度信号,并送计算机处理;当油温较高时,系统将输入冷水使油降温;如果油温超过一定温度,计算机将报警。当油温较低时,停止送水。
整个系统的原理框图如图1所示。
2 系统设计
2.1 硬件
坦克兵动态训练模拟器的硬件系统包括开关电源、嵌入式控制器、液压缸、放大器、伺服阀、油缸、液位传感器、温度传感器、压力传感器、位移传感器、油箱、油泵、溢流阀等。
2.1.1 计算机
系统采用了嵌入式平板电脑ZY-100作为人机界面和控制器,它集微处理器、PLC、触摸屏、A/D转换、D/A转换为一体。模拟训练器通过底部的三路油缸控制顶部平台的运动,油缸的运动轨迹由给定的计算公式得出,控制的难点在于三路油缸的实时和同步。该油缸是通过伺服阀的开度和方向以及位移传感器的反馈来确定运动位置,达不到实时性要求就无法对油缸位置进行精确的控制。平台的位置由三路油缸共同决定,如果不能做到三路油缸同步,也就无法得到设想的运动轨迹,达不到预定的目的。
液压伺服系统控制效果好是因为采用模拟系统(响应快),但由于参数调整非常难,自适应性差,以及参数漂移等问题使模拟系统难以保证长期可靠运行,用数字系统代替模拟系统时,只有当数字系统采样时间和响应(循环周期)时间达到1~2 ms时基本上与模拟系统一样,达到1 ms时,效果更好。为了满足液压系统的实时性和稳定性要求,先后试验过工控机、PLC等多种控制平台,但是大多不能满足苛刻的实时性要求,最终采用自行研制的响应快、可靠性高的嵌入式系统,设计了嵌入式控制器一一嵌入式平板电脑ZY-100作为人机界面和控制器。
该控制器通过选用12位高精度的模拟量输入/输出端口,直接与CPU进行通信,响应速度快。位移传感器送过来的电流信号,能迅速转化成位移量,获得油缸的当前位置,与给定的目标位置进行比较输出,控制油缸的运动。在CPU强大的计算能力支持下,从采集、转换、比较到输出,总共耗时不到0.5 ms。采用ZY-100外部选配的模拟量输入/输出端口,不但很好地满足了实时性要求,也降低了硬件成本。
ZY-100带有色彩丰富的人性化界面,可以对设备的运行情况进行实时监控。简单方便的触摸屏控制方式,使安装和操作变得十分简单。
嵌入式控制器指标如下:
(1)24路可编程TTL电平开关量输入输出;
(2)16路单端/8路双端模入;
(3)4路独立模出;
(4)3路计数通道。
2.1.2 电源与接地
本文采用明伟牌开关电源,输出电压分别为±9 V,±24 V,+5 V。其中,±9 V供给三路电压/电流放大器;24 V供给溢流阀和三路伺服阀。
系统配有UPS,保证系统不断电。为了保证可靠接地,本文采用了模块化布局。
启动电机时有三角型接法到星型接法的转换,需要延时6 s;电机启动后需要延时2 s再启动通道阀和系统阀,同时给稳压电源通电。
2.1.3 PLC
为了增加带负载的能力,微处理器产生的控制和报警信号通过PLC输出。该输出控制电机启动、停止;控制溢流阀的开启、停止;当温度过高时,输出报警信号。
2.2 软件
系统软件在LabWindows/CVI软件平台开发,支持的操作系统是Windows 9x和Windows 2000,硬件要求Intel Pentium 166 B,内存128 MB,128 MB以上CF卡和多功能数据采集卡。该软件可根据设定的曲线模式,输出数据到电液伺服阀,模拟坦克的颠簸振动效果。系统可实现数据采集、状态检测、曲线显示、闭环反馈输出等功能。
软件的功能之一是使计算机产生不同的电压波形,以控制伺服阀的开度和方向有:时速45 km/s,67 km/s颠簸路面;时速30 km/s;49 km/s凹凸路面;加速行驶;左后、右后左前、右前倾斜。
3 结论
本文实现了M1A2主战坦克的各项参数指标模拟包括:时速67 km/s颠簸路面;时速48.3 km/s凹凸路面;7 s的时间内将速度由0~32 km/s加速;爬坡31°,通过高1 m的左垂直墙、左后、右后、左前、右前倾斜。
该设计主要有三个特点:
(1)三自由度控制这种程度的复杂运算来用烟台中宇航空液压有限公司的平板电脑完成,实现了计算机、PLC和触摸屏三合一,集成化高、连线少、性能稳定、体积小、厚度只有20 cm,较一般的三自由度控制器体积小得多,并且克服了用模拟控制系统实现时由于参数调整非常难,自适应性差以及参数漂移等问题使得模拟系统难以保证长期可靠运行的缺点,克服了一般用数字系统代替模拟系统时难于三路油缸的实时和同步控制的缺点。另外,数字控制系统较模拟控制系统更加灵活,在以后进一步的研制中,可以根据具体情况,通过编程,增加更多的控制功能。
(2)软件编程使人机界面操作平台实现了傻瓜式操作,减少学习设备的训练强度。
(3)模拟的道路状况可通过实时采集数据输入到计算机。目前,正在进行该产品的升级换代,将使新一代产品的功能更加完善,性能更加稳定。
本文设计的M1A2型主战坦克的坦克兵动态训练模拟器,界面操作简单,运行稳定,实时性好,较好地满足了对坦克手的模拟训练要求。实验效果表明,该坦克兵动态训练模拟器可以灵活地模拟坦克经过的各种地形,可以成功地用于坦克兵动态模拟训练。
本文的研究成果不仅为坦克兵训练模拟器的进一步完善打下基础,也为诸如飞机、太空舱等其他类型的训练模拟器的研究提供了参考。






