子帧同步策略逻辑实现如图5所示。由图5可以看出,子帧同步与策略的正确性依据以下条件:
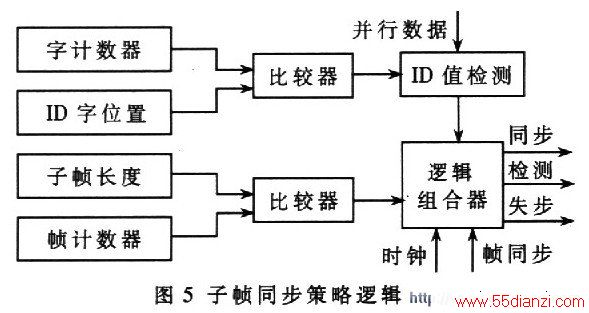
(1)ID字位置及其值的正确性(如过零检测)。
(2)子帧长的正确性(通过子帧长与帧计数器值的比较判断)。
(3)同步、检测和失步的判别,方法与帧同步策略类似。
在本设计中,双PCM帧同步检测、帧/子帧同步策略均通过CPLD逻辑器件实现,不仅提高了设计的集成度,而且提高了系统的可靠性及其性能,使每路PCM分路速率达到20Mbps的国际先进水平。
4 软件平台选择及软件组成
目前常用的 遥测 前端处理器操作系统有Windows2000和VxWorks二种。Windows2000通用、软件资源丰富、易于使用和扩展;而VxWorks是一个用途广泛的实时操作系统,具有良好的实时性、可靠性和可裁减性。根据遥测数据处理的实际需求,本设计选用了Windows2000,程序设计语言选用C++。
遥测 前端 处理器 软件组成与实时数据处理流程框图如图6所示。
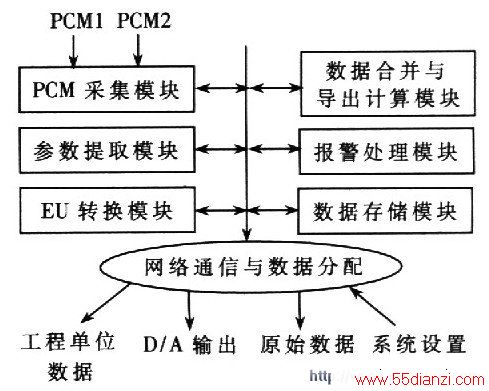
遥测前端处理器中的软件由PCM数据采集、参数提取、工程单位转换、数据合并与导参数计算、报警参数处理、数据存储、网络通信与数据分配等模块组成。其中,采集、参数提取、工程单位转换模块与数据流相对应,每个数据流单独一套。PCM数据经采集后,接事先定义对参数进行提取、工程单位转换和必要的处理、存储。按事先设置,需要模拟输出的数据直接由D/A板输出,通过网络把工程单位数据和原始数据传输给工作站,由工作站完成遥测数据的各种方式的可视化显示和飞行试验专用数据分析与处理。
基于 cPCI 总线的新一代 嵌入式 遥测前端处理器的设计和实现,使遥测数据处理系统的集成更加容易。其20Mbps的速率、双路PCM数据的分路和实时处理能力。可满足现代军、民机飞行试 验遥测数据处理要求。它的应用使我国的飞行试验遥测数据处理技术水平得到很大的提升。同时,cPCI总线的加固特性,使以嵌人式遥测前端处理器为
核心而组成的实时遥测数据处理系统,满足了运输类飞机机载要求和地面车载环境要求,拓宽了遥测前端处理器在军工试验和民用工业试验等领域内的应用范围,有着广阔的应用前景。






