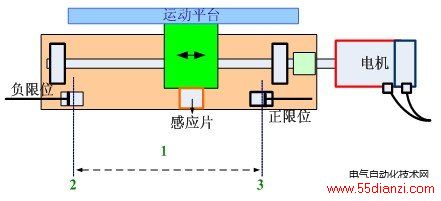
图六 方式二直线运动系统中感应片的位置
假定采用伺服电机轴通过联轴器,连接到滚珠丝杆(再驱动运动平台),如图五示。从机械的角度,这里减速比是1:1,即电机轴每转动一圈,滚珠丝杆转一圈,同时运动平台往前走一个丝杠的导程(如导程是:5毫米,10毫米或20毫米)。从电气的角度,电机转动一圈,其编码器码盘转动360°,同时在固定的角度产生1个Z脉冲(如图四中示),其脉冲脉冲频率取决于电机轴转动的速度,假定电机旋转速度是3000转/分钟,即每0.02秒产生一个Z脉冲,其脉冲宽度极小;其脉冲宽度取决于电机速度和编码器的A/B相线数,假定编码器是1000线,在电机旋转速度是3000转/分钟时,Z脉冲的宽度是10微秒,远小于光电感应器的最快响应时间。另外,在该条件下,假定滚珠丝杆导程是10毫米,如果采用Z脉冲来定位零点,其直线零点理论位置精度可达,10毫米/1000=10微米,远远高于第1种回零方式。
本文关键字:暂无联系方式通用机械,应用领域 - 通用机械
上一篇:焊接机器人及其柔性夹具控制系统






