二、软件说明
系统的软件需要完成一些任务。最主要的是控制采集一处理一输出,同时需要读取两个电位器的值。在单片机内部A/D进行“专心地”采集声音信号时,一个内部的计数器和比较器被用来读取电位器的值。首先,当计数器停止时,电容C7通过电位器充电至某一电压值,计数器的当前计数值与电位器的阻值相关:
简单地说,机器人声音的效果取决于输入声音信号与其延迟信号的混合,再对这个混合信号进行延迟等得到。同样的方法可以产生回响的效果,但是对输入信号需要至少延迟lOOms。用于延迟的单片机内部FIFO缓冲器需要200B的空间,于是,在lOkHz采样率下,最大延迟为200/lOkHz=20ms。
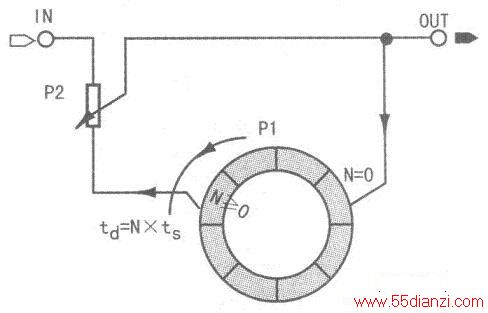
下图对这种算法进行了形象地描述,图中的“轮子”以每圈20ms的速度逆时针转动,它代表了环形的FIFO(先入先出)缓冲器,输入信号与延迟后的输出信号混合(图中通过电位器表示),产生一个新的输出信号,这个信号又反馈到环形缓冲器的开始。
延时的长短通过电位器Pl设置,同时Pl的值被软件用来设置与环形缓冲器的输入点。电位器P2则用于设置反馈的深度。反馈信号越强衰减越小,而声音的效果越明显。
Pl可设置输入环形缓冲器的位置(1~200)。
于是延迟可以100μs—20ms之间变化。由于延迟信号反馈到一闭环中,当衰减足够小时阻尼共振将变得非常明显。共振的频率等于延时的倒数,可以设置在50Hz~lOkHz之间,实验表明,当频率为250Hz左右时,机器人的声音效果最好。
三、最终系统
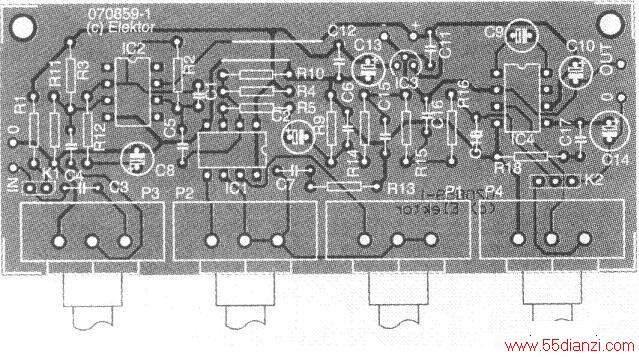
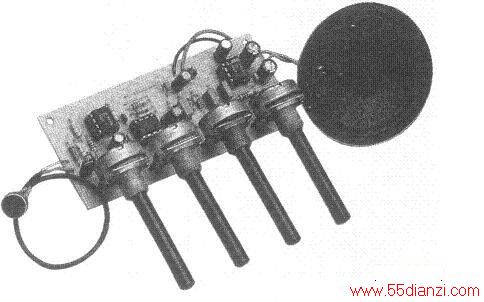
上图、下图所示分别为模仿器的电路板外观和最终完成图。
如果使用的是驻极体话筒,可用一个跳线来短路Kl的两端。而K2的跳线可根据实际的输出需要进行选择。机器人声音模仿器需要的电流很小,一般为25~150mA之间。所以可以使用9V的集成电池给系统供电。如果不使用功率放大器(IC4)部分,则功耗可降至25mA。
完成焊接安装后,在接通电源之前最好将效果设置为最小(调节Pl)。当从喇叭中听到不失真的声音信号后,再来提高声音的效果至感觉最像机器人即可。
上一篇:Atmel单片机并口下载线制作






