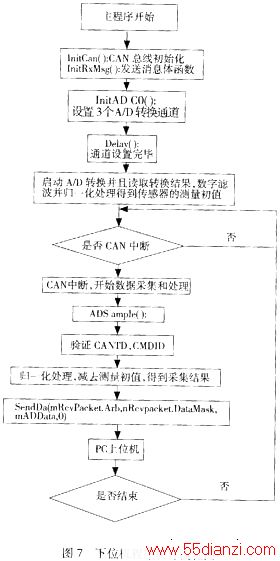
������Ʒ�Ϊ��λ��(������)��������ƺ���λ��(PC)��������ơ�ÿ����������Ϊһ���ڵ�ͨ��CAN�������������յ���λ������������Ƚ��������жϣ����ݲ�ͬ������������Ӧ�����ݴ�������λ��(PC)��Ҫ��������㡢����Ϣ(������)���ش�����Ϣ����ѯ����Ϣ�����α����������λ�������������Ҫ�����ݲɼ�����(A/Dת��)�����ݴ��������Լ�CAN����ͨѶ����������ɡ�����CAN�ж���ǰ�����������н���һ�����ݲɼ����õ�������ϵͳ�ij�ʼֵ�������а���3��A/Dת��ͨ��;��ʱ�����ͨ���ij�ʼ��;���ݲɼ�����CAN�жϳ�������ɵģ�ÿһ���ж����1����ά����Ϣ���ݵIJɼ��Լ���Ӧ��A/Dת��;ͬʱ��ȡת���������ת������������ִ��������ִ�����Ҫ�������˲�������Ϣ����������ɣ������˲���Ҫ���ô����ƶ���������ƽ��ֵ������;���ݾ����������ͨ��SendData()�����������ݷ��͵�CAN�����ϣ���λ��ͨ��ID��ʶ�������λ�����ݣ��������̼�ͼ7��
4 �������궨ʵ��
E��ĤƬԪ���ṹ�ĸ�����ʹ�ò�Ʒ���Ե�һ���Ա�һά���������ѱ�֤��Ӧ��Ƶ���Ƭ���պ��ѱ�֤���������������Щ���ؾ�����������ʵ�ʾ�̬���Ժ����ۼ���ֵ֮�����һ��������˴������ľ�̬����һ����ñ궨ʵ��ķ�����ȡ����궨ȷ�Ƚ�ֱ��Ӱ�촫����ʹ��ʱ�IJ���ȷ�ȡ���ν�������ı궨�����ǽ�������������·���ֵ�������ڴ���������ϵԭ���ϵ���ά��֮���������ϵ���궨ʵ����̰�����̬�궨��ʵʱ������֤�����֡�Ϊ�˼����������Ӱ�죬����һ�־���һ����������������С���˱궨��������F�Ǽ���������VΪ���������������(������)��CΪ�궨����EΪ��������
F=CV+E (6)
ʽ�У�F��VΪ��֪��;E�����趨�����ǣ��궨�����������ת��Ϊ���궨����C��ʹʽ(6)����С���˷����������š�����ָ���������궨�����У���ʩ���ڴ�������X��Y������غɺ�������·֮��Ĺ�ϵ���в����������ֵ(������)������������ֵ�Ķ�Ӧ��ϵ��ͼ8��ʾ(XLable��ʾ�������궨�����غɣ�Ylable��ʾ���������������)��
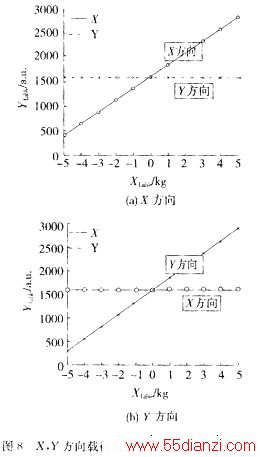
��ͼ8���Կ�����������X�������ʱ�������غɺʹ�����������·���֮���ӳ���ϵ���Ի�����Ϊ�����Եģ�Y����������ϲ�����2.5%��������С���˷��õ������������龲̬�궨����Ϊ�ɴ˿��Լ������������I�����Ϊ2%��II�����Ϊ2.5%������C1��C2����궨����Դ���������ʵʱ�������飬�����ʾI�����������2%��II��������2.5%��ͨ���ñ궨ϵͳ�õ��ľ�̬�궨������������ֵ�ȽϽӽ���˵���궨ϵͳ�ͱ궨��������ʵ���еġ�
5 �� ��
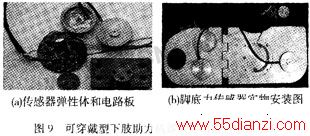
�������һ�����͵����帨���Ϳ��������ˣ������һ����CAN���ߵ���֫�˶���Ϣ��֪ϵͳ����ͼ9���������ɴ�������������������Ҫ�Ŀ�����Ϣ��ȷ�������������ࡢ�����Ͱ�װλ��;�ص�����Ȳ��ͽŵ����������ĵ�������ƣ�������·������λ������;�Դ��������б궨ʵ�鲢�����ݽ��з�����������������һ������ָ�꣬���˵�����о��е�������ۺ���ƹ�������ȷ�ģ�������������ɴ�������֫���������˿���ϵͳ����Ҫ��δ���Ĺ�����Ҫ���������¼��㣺�ټ������ƴ������ĵ�����ṹ�������㴫��������ָ��Ļ����Ͻ�һ����С����������������;�ȷȷ��Ӧ��Ƶ���Ƭλ��;�����ƴ������IJ�����·��ƣ������˲���·���Ľ��Ŵ��·;�۸Ľ��������ı궨ϵͳ���ѱ궨������͡�
���Ĺؼ��֣������� ������-���ܳ�������֪ʶ���� - ������-���ܳ�






