体感遥控器软件系统开发环境为IAR EWARM5.4,μC/OS-II版本为V2.86,STM32F103C8T6的调试工具为J-Link仿真器,STM32F103C8T6的固件库版本为V2.0.3。
3.4 遥控器与机器人本体通信方案设计
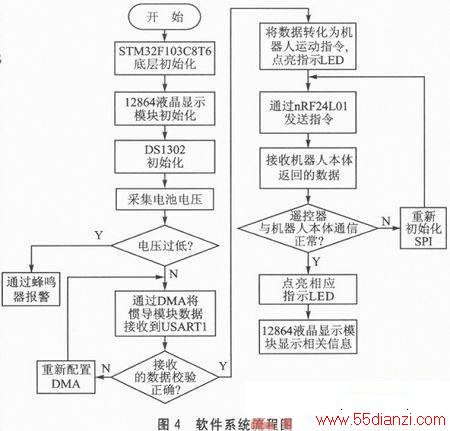
本设计采用严格的“一问一答”形式,即每发送一条指令都需要机器人本体返回一帧数据包。遥控器发送一条指令后,等待机器人本体返回的数据包,只有获得机器人本体返回的数据包后才可以继续发送指令包。如果机器人本体接收到错误指令(经校验错误的指令),置位通信错误标志位,上传数据包;同时,机器人本体报警,将机器人速度置0,接下来1 s内下位机清除串口DMA,重新接收指令。如果遥控器收到的数据包中通信错误标志位置位,则重新配置nRF24L01无线模块,重新发送指令。
4 性能测试
对本文所描述的嵌入式机器人体感遥控器进行了相应的测试,测试环境分别为室内走廊环境和室外环境,测试结果如表2所列。测试结果表明,在室内走廊环境中,收发指令的正确率在95%以上;在室外环境中,由于环境中可能存在多种干扰,并且距离在20~30 m,正确率在90%以上。由于遥控器底层软件具备一定容错能力,90%以上的正确率完全满足要求。

结语
本文讨论了基于STM32F103C8T6的嵌入式服务机器人体感遥控器的设计与实现,并对具体的硬件电路和软件系统进行了详细的介绍。经过大量的实验证明,本体感遥控器具有操作简便、可操作性强、通信可靠、稳定性和人性化程度高等优点,在实验室服务机器人的实际应用中取得了良好的效果。
上一篇:基于DSP2812的运动控制平台






