步行助力机器人与人体下肢通过束带紧密联系在一起,如图 5 所示,步行助力机器人的最终运动是通过位于使用者与装置间的各测力点感受到的人体运动时的多维力信息来完成自主运动,不需要任何操纵台或外部控制设备,形成一个高度自动化的人-机混合系统。 助力机器人要达到助力的功能,首先,对使用者下肢运动预判;其次,助力装置除克服自身动力矩(主要由装置自身重量引起的重力矩)外,还要降低人体肌肉对关节所能产生的力作用,即降低肌力,从而达到助力的目的。 结合装置自身的动力矩,对式(3)进行如下调整:
其中: Mexoskeleton是对外骨骼装置进行动力学分析后的关节动力矩; μ 为修正因子;助力机器人连杆装置的转动惯量计算如下:
近似计算人体各段转动惯量的公式如下:
其中: X1为体重[kg]; X2为身高[cm]; Bi0,Bi1,Bi2为二元回归方程系数。
同时,角加速度可表示如下:
其中: dt 可以近似地认为是实际控制系统中的控制采样周期 T ,即 dt =·T ,整理合并后可得:
式(7)所确立的力与角速度间的对应关系式是建立在人体肌肉功能模型之上,是形成系统伺服规则的重要依据。 5 实验
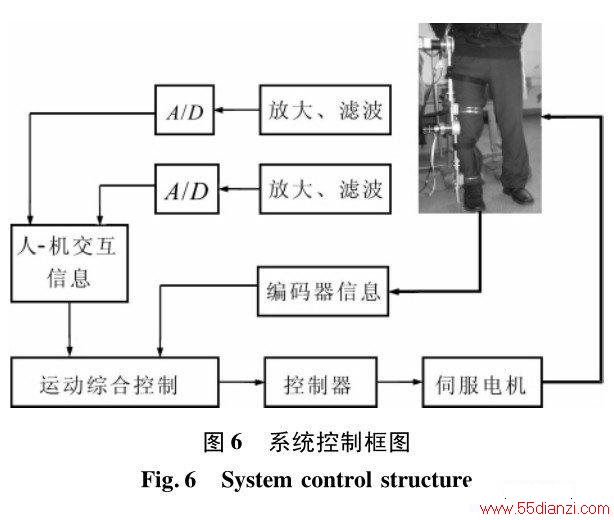
实验以原型样机为对象,利用人-机间的交互力传感器进行人-机行走实验,除使用者手拿一个紧急停止按钮外,整个过程由计算机独立控制,无任何操纵杆或控制面板。 图 6 是人-机混合系统控制框图,图7 是单腿混合助力系统运动时的输出响应曲线。 图7 中,根据人-机间交互力的方向与外骨骼助力机器人关节旋转方向的关系,把系统的每个往复运动分为过渡和助力两个阶段,由图 7 可知,助力阶段所占比例越大,则助力效果就越明显。 通过进一步调节控制模型中的弹性系数及阻尼系统可以改变过渡和助力两个阶段的相对占有时间。
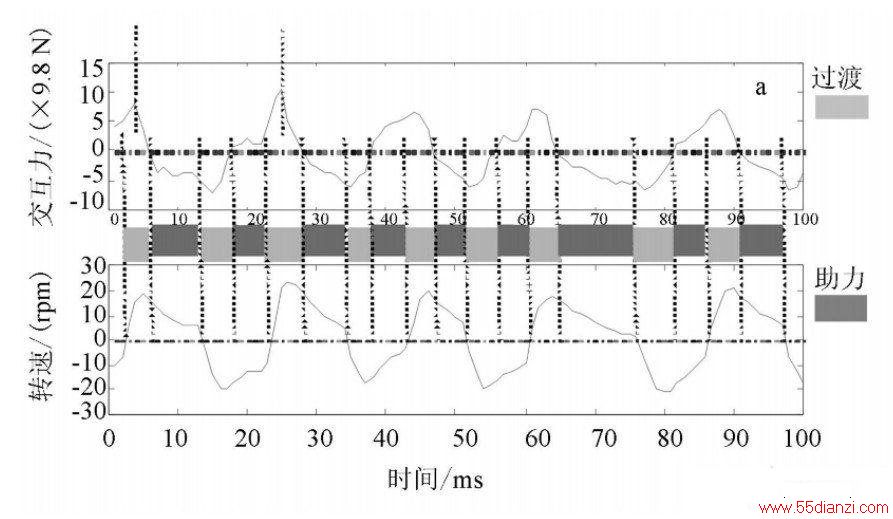
a:右小腿
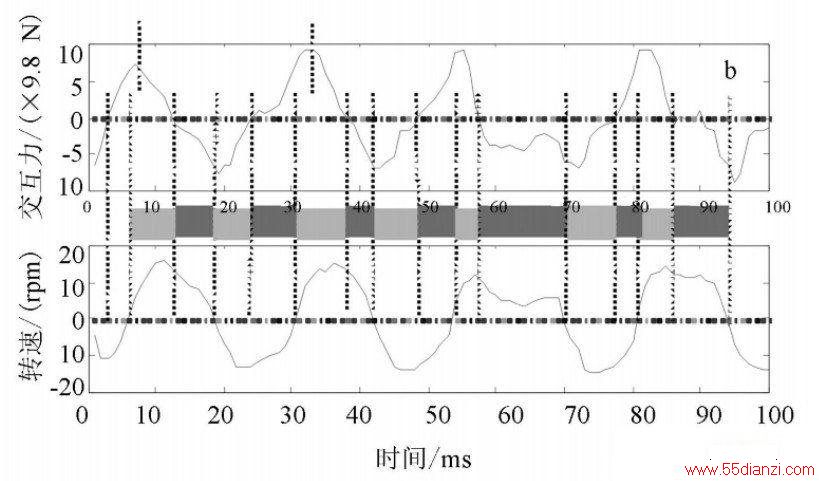
b:右大腿
6 结语
实验表明,基于人体肌肉功能模型的控制方法可以为人体下肢运动提供助力支持,该方法与假想柔顺控制方法相比,可降低系统对人-机交互信息的依赖性,但此方法需要提供必要的人体参数,如下肢各段的长度、各段的转动惯量等,因此它对人体模型的准确性要求较高。“助力多少”是对助力效果最直接的认定,是助力机器人重要性能指标之一,“助力多少”依赖于助力阶段与过渡阶段之间的相对占有时间,对“助力多少”的确定将是作者下一步研究的内容。
本文关键字:机器人 机器人-智能车,电子知识资料 - 机器人-智能车






