视频观测系统介绍
单元件或多元件的视觉系统能有效地检测光线是否存在,但不能给出物体的形状。这大大限制了机器人的使用环境。通过检测物体的形状,一个机器人可以产生判断周围环境的智能,并且引导它通过周围的物体。识别它的‘主人’,或者做更多的事。
仅仅在几年前.视频观测对于任何机器人实验还是一种昂贵的方案。但廉价的‘针孑L’照相机的出现(所以这样称呼是因为它们常用于家里或公寓的大门上的针孔透镜里)已使机器视觉的硬件走向实用。
机器人视觉所用的视频系统不需要太高级。图像分辨率可以低到100×100像素(总像素‘10000)。当然建议使用不小于300×200像素的(总像素60000)。分辨率越高,图像越好,机器人识别形状的能力就越强。彩色照相机不是必须的。有时。彩色会使编写视频插值软件很困难。
能提供数字输出的视频系统比仅提供模拟输出的系统好用。你可以通过串行口、并行口或LJSB口把数字视频系统直接连到PC机上。
模拟系统则需要通过视频捕捉卡。
快速的模一数转换器或其他类似设备接到PC上。
虽然视频硬件现在对于多数机器人建造已经能承受,但传送机器人所用的图像则需要进行高速处理和复杂的计算机程序。给机器人以识别形状的能力是很困难的任务。
研究一下门道的静态图像。我们的大脑很容易综合出门道的图像,适应我们观察门道的角度;光线落在门上的数量,方向,对比度;门道中门框的大小和种类:门是开着还是关着;以及上百种、甚至上千种其他变化。机器人视觉要对这些变化的每一种进行分析,这种工作所需要的计算机功能和软件的复杂程度都超出了大多数机器人实验的范畴。
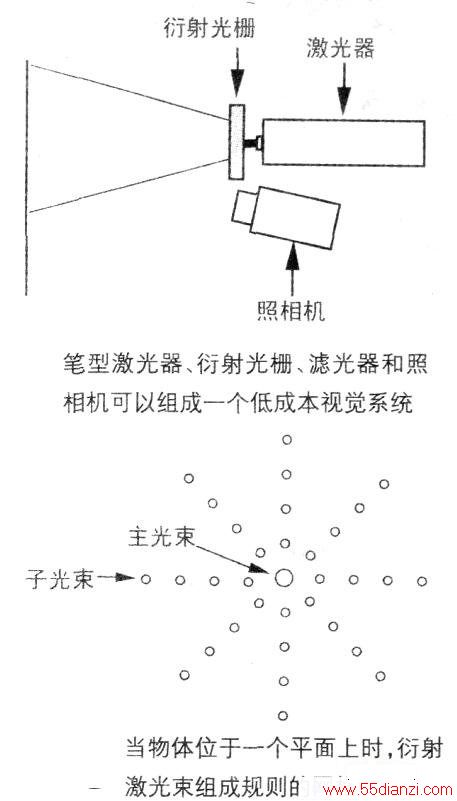
依赖激光的视觉幸运的是,一些复杂性较小的方法可以试用于机器人实验中。其中有一种可能希望试试的方法,元件花费不多(减去照相机)。需要一个激光笔,红色滤光镜,和一小片衍射光栅。
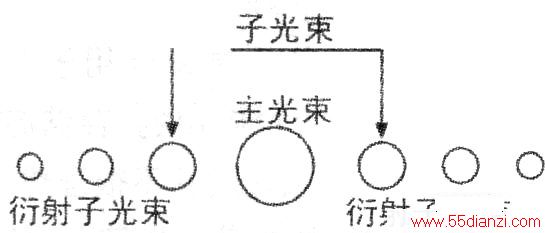
系统工作原理类似于CD播放机使用的三线聚焦原理。使用衍射光栅使激光分为子光束。一束强光束出现在中央,两侧是弱的子光束。如下图所示。CD的三线聚焦系统使用最靠近的两束光线,忽略其余的光。光束的面积随着透镜与桌面的距离增加而加大。同样。光束的面积也随着透镜与CD的距离的减小而减小。CD播放机中的多片光学检测器汇聚这些光束的反射光以决定要将透镜多数CD播放机用衍射光栅分解(12)单束激光为一系列子光束.子光束用于聚焦和跟踪光学系统移得离桌面近一些还是远一些。从历史上讲,这种聚焦技术的基本原理超过100年了,是由法国物理学家。JeallFor.ICaLJIt发明的。
CD播放器使用由在塑料片的一面上划线所形成的衍射光栅。这导致激光束沿着同一平面被分成几束。如果使用由竖直和水平线划分的衍射光栅,被分成多束的激光束投射到一个平面上时就形成一个网格(见上图和下图)。当激光和平面的距离变小时光束接近;反之,当激光和平面的距离变大时光束散R-o可以设想一下。当光束射入一个三维空间时,光束可以形成一种测量图,根据光点会聚或散开可以判断激光源与物体间的距离。放置在照相机镜头前的红色滤光器滤掉了除笔形激光器发出的红光外的大部分光线。使用高质量的只通过二极管激光器发出的波长为635到680纳米光线的带通滤光器能得到最好的结果。检查你正在使用的激光的规格,这样你可以得到精确的滤光器。Meredittl器械公司和Midwest激光产品公司可以提供各种笔形激光器和光学滤光器。
激光衍射系统主要的优点在于:编写测量像素间距离的软件要比写认出形状和模式的软件简单的多。对于许多机械视觉应用来说,使机器人认出物体的实际形状并不比引导机器人绕过或处理那个物体重要。例如,机器人可以看到在它道路上的一个椅子,但对它而言,是否认出椅子是十八世纪早期的女王圣安妮的双背长椅并没有什么实际意义。它所需要知道的是有东西在那里并且可以通过左右移动避开物体。
超过光感的视觉视觉提供一种快速有效的方法让我们判断我们的环境。眼睛摄取宽广的领域,大脑处理眼睛所看见的东西组成一幅即时环境画面。然而,从一些动物发展的独特的感觉得到一些提示。视觉并不是唯一的看见的方法。例如。蝙蝠用尖锐的声音快速而且有效地导航通过黑暗的洞穴。他们的声纳很精确,从而蝙蝠可以感觉到二十英尺或者更远的处飞过的微小的昆虫。
类似的,机器人也并不总是需要光感视觉系统。你可以考虑用另一种可选择的系统替代或增加光感视觉。下面的介绍一些你可以轻易使用又负担得起的技术。
一、超声波
像山洞蝙蝠一样。机器人可以用高频声音来了解它周围的环境,超声波传感器在偏光即时照相机,电子磁带调节装置,自动反馈警报和安全系统中应用是很普遍的。其全部工作是:发射高频声波脉冲,接着测量到接收反射声波所占用的时间。
超声波系统被设计用来决定发射器与它前面的物体之间的距离。更精确的系统可以测绘一个区域形成一幅地形图。用一种3一D平面显示几个附近物体的相对距离。这种超声波系统通常应用于医学领域。一些传感器被设计配套使用——发射器发射一系列短的超声波脉;中而另一个则接收超声。其他的传感器,例如用于偏光照相机和电子磁带平衡装置的类型,在一个部件内组合了发射器和接收器。
超声波图像的一个重要特征就是高频比低频更不易发散。也就是说高频声源产生的声波比低频声源产生的声波发散面要窄。这个现象产生了超声波系统的精确性。电子学家们已经知道用新型的超声波部件对机器人实验是有用的。可参考在上面几讲中的关于用超声波传感器来引导机器人的信息。
二、雷达
雷达系统是基于与超声波类似的原理工作的,但使用的不是高频音波而是高频雷达波。大多数人知道大功率的雷达系统用于航空,而小功率的型号通常用于安全系统。自动开关门,自动反馈报警,当然还有警察用的速度测试装置。
雷达很少应用于机器人系统。因为花费较超声波系统昂贵。但是雷达有受风、温度和距离影响较少的优势。例如雷达可以传播几里远。而超声波只在10到20米内有效。
三、无源红外线
无源热电红外线传感器可以检测到物体自然散发的热量,在安全系统和自动户外照明中很受欢迎。这种热量是红外射线形式辐射:一种超出人眼视觉范围的光线。无源热电红外线系统主要检测到达传感器的热量快速的变化,而这种变化通常代表运动。
典型的无源热电红外线传感器配备一个涅尔透镜聚焦从相当宽的范围射到传感器豆大的表面上的红外线。在机器人视觉应用中,你可以用一个远距离照像镜头来代替涅尔透镜,则检测仪一次只检测一个小的范围。装到一个移动平台上,传感器可以检测到在机器人面前的任何物体的红外线的瞬时变化。
四、触觉反馈
许多机器人能够被只有一到两个开关的引导器有效地指明道路。机器人的每个开关就是—种触觉传感器:当一个开关被按下时机器人就知道它碰到了前面的物体.基于这个信息,机器人停止并选择另一条路线到达它的目的地。
为了实用,机器人必须在它们可能和周围环境中的物体接触的地方安装触觉传感器。例如,你可以在一个方形机器人的底部外围安装四个开关,这样机器人和任何物体接触都会触发某一开关。机械开关只能被物理接触所触发;安装了红外线反射开关和电容开关接近物体就能触发。如果机器人在接触物体时可能被损坏,为了防止损坏物体,那无接触开关就很有效了。






