接下来依次安装 zlib库,png库、libttf库,它们的作用分别是:其他的库的编译基础、显示PNG图形、显示文字。完成以上附加库的交叉编译工作后就可以编译libminigui了。把/usr/local/arm/2.95.3/arm-Linux/lib中相应的库拷到目标板/usr/lib目录下,拷贝时先对库文件执行arm-Linux-strip命令,去除文件中的调试信息。同时把资源文件复制到目标平台的/usr/local/lib目录下。这样就完成了交叉编译工作,可以将PC上调试好的应用程序下载到目标硬件平台下进行应用了。
通用工控平台人机界面开发
1 人机交互界面需求分析及总体设计
通用工控平台通信人机交互界面是集功能演示、信息采集、设备状态、通信交互等功能于一身的人机交互平台,可以高效、直观的显示通用工控平台的基本信息,同时有效的指导用户的操作,提高使用效率,是用户和通用工控平台交互的主要方式。
该人机交互界面显示器选用PHILIPS公司的14英寸彩色显示屏,软件运行环境选用嵌入式操作系统Linux 2.6.21和GUI开发环境MiniGUI 1.3.3构成,整个软件的设计过程需要完成以下功能:
(1) 实时显示该平台具体信息,及本网内在线的其他工控设备的信息;
(2) 以该平台为控制器实现对本网内在线的其他常见设备的多线程信息采集与控制;
(3) 以UDP及RS485两种通信方式实时控制工控网络内部;
(4) 对工控设备掉线自动断开连接,防止用户误操作;
通用工控平台通信人机交互界面主要是针对UDP和RS485两种组网方式基于Modbus协议完成工控系统中功能演示、信息采集、设备状态、通信交互的功能,设计上要求简单实用,操作方便,而复杂的界面会带来不必要的开销并影响性能。根据需求分析设定人机交互界面整体设计方案及效果图如图3、图4所示。

图3 人机交互界面整体设计方案
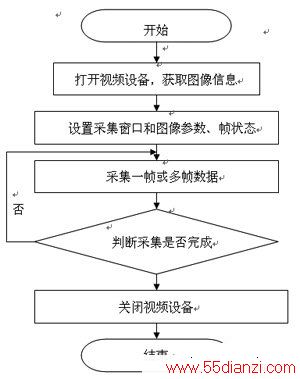
图4 总体效果图
2 界面设计流程
利用MiniGUI进行界面设计流程如图5所示。
图5 界面设计流程
基于工业测控Modbuss协议的通信实现方案
一个好的工控平台必须具备高效通信的功能,才能跟上工业发展的要求。本文所设计的通用工控平台,可以作为控制中心对通信网络内的其他设备进行数据采集和控制,包括工控现场典型意义上的数模转换设备,模数转换设备,数字量设备等,随时掌握各个工作现场的情况。由于Modbus协议是工业测控领域的标准通信协议,协议简单,应用广泛,因此本平台通信软件的设计就采用Modbus协议。
工业测控领域常见的组网方式主要有UDP方式和RS485方式,分别以自身独特的优势在工业组网占据着一定地位。为实现工控平台通用性的设计目标,本平台将两种组网方式融合在通信人机交互界面中,图6为本平台通信的拓扑结构图。

图6 通信拓扑结构
结语
在基于ARM和Linux的通用工控平台的研制过程中,硬件平台选择合适的ARM微处理器AT91RM9200,并对其外围部件进行扩展,以适应当前工控现场更加丰富的技术要求,并结合现场总线技术,扩展多种通信接口,满足用户的通信需求;软件平台采用嵌入式领域应用最广的Linux为操作系统,同时构建交叉编译环境,并充分利用开源软件,基于图形界面开发的MiniGUI,针对工控领域的总线协议Modbus设计出基于UDP和RS485两种通信结构的工控人机交互界面,实现了以网络沟通能力强、接口丰富为技术指标的基于ARM和Linux的通用工控平台。
本通用工控平台的主要特色有:
(1)硬件接口丰富,适应工业测控领域各种需求;
(2)使用3U插槽,增强通用性及扩展性;
(3)基于Linux操作系统及MiniGUI图形界面开发环境,人机交互界面友好便捷;
(4)采用工业测控Modbus通信协议,基于串行RS485及网络UDP构建通信拓扑结构,应用范围广泛、性能可靠、实时性高。






