1 引 言
本文所设计的纸传动控制系统为应用ABB变频器和西门子PLC所组成的控制网络来完成造纸机电气控制系统设计的;其电气传动控制系统是基于S7-200 PLC控制的交流变频调速控制系统。
2 纸机对电气传动控制系统的要求
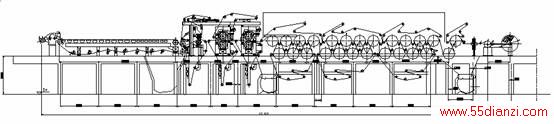
该造纸机的系统结构总图如图1所示。本纸机的主要技术数据如下:
纸种:文化纸
定量:52~80g/m2
最高车速:350m/min
爬行速度:<40m/min可调
升减速时间:0.1~1000s可调
工作电压:额定电压的±10%
电源频率:50Hz±5%
静态精度:≤0.1%
频率漂移:≤0.1%
频率分辨率:0.01Hz
频率控制: 0~50Hz
起动转矩:额定转矩的200%
左、右手机:右手机
该纸机18个传动点,分别由18台交流电机单独拖动,每台交流电动机由ABB全数字变频调速装置驱动,闭环控制。系统的控制采用PLC作为控制核心,由PLC对操作台上每一传动点的操作信号进行处理(每个传动点在操作台上都设有:速度增加、速度减少、紧纸、爬行/运行等操作按钮),并把相应的速度信号以通信的方式传送给变频器。同时,还对伏辊、驱网;吸移、真空压榨、一压、二压分别进行负荷分配控制。另外,在操作台上还显示每一传动点的车速及工作电流,并具有运行、故障指示。
纸机正常运行对电气传动控制系统的要求基本有以下几点:
2.1纸机传动系统要有一定的稳速精度和快速动态响应。其中稳态精度±0.02-- 0.01%,动态精度0.1%-- 0.05%;
2.2工作速度要有较宽、均匀的调节范围,适应生产不同品种、定量的需要。调节范围为I=1:10之间;
2.3各传动分部间速比稳定、可调。为了使纸机可以生产良好的纸页和提高纸机正常工作时间,纸机各分部的速度必须是稳定、可调的。各分部的调速范围为±8~10%;
2.4 爬行速度。为方便检查、清洗聚酯网、压榨毛毯、以及检查各分部的运行情况,各分部应具有15~30米/分可调的爬行速度。但这样低速运转时间不宜过长,以减少无效的运行和机械磨损;
2.5 具有刚性或柔性连接的传动分部间,在维持速度链关系基础上,还须具有负荷动态调整的功能,以免造成由于负荷动态转移而引起有的分部因过载而过流,有的分部因轻载而过压;
2.6 各分部具有微升、微降功能,必要的显示功能,如线速度、电流、运行、故障信号等。相关联的分部具有单动、联动功能;
3 纸机电气传动控制系统的设计
3.1 系统硬件选择与设计
硬件选择依据系统的控制精度、通讯速度、响应时间、高性价比、高可靠性的原则,选用SIEMENS S7-200PLC、CP226通信处理器,作为系统主控单元,控制整个系统。该纸机的电气控制原理图如图2、图3所示:
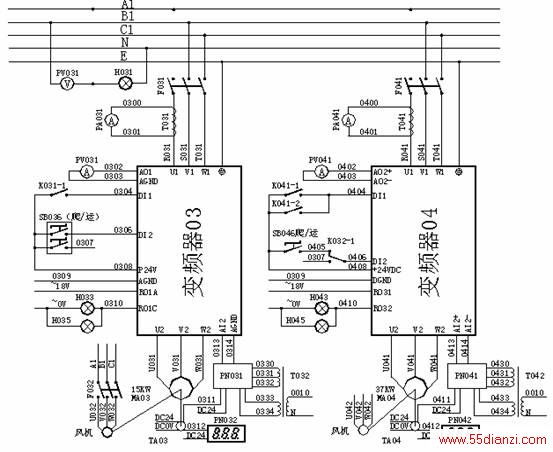
3.1.1变频器选用ABB公司的ACS800系列高性能变频器,ACS800变频器采用先进的DTC控制技术,内置直流电抗器,降低进线电源的高次谐波含量,最大起动转矩可达200%的电机额定转矩;ACS800的动态转速误差,闭环时为0.05%,静态精度为0.01%。动态转矩的阶跃响应时间,闭环时达到1-5ms。可较理想地满足该机的高传动性能的需要。
3.1.2反馈与速度控制
系统为了降低成本,选择了ABB,ACS800和ACS400混合配置。由于ACS400本身不带速度反馈接口,为了实现速度闭环控制,需另外加反馈装置。本系统设计选用了由陕西科技大学自行设计的脉冲频率电流变换单元。把测速脉冲转换为电流信号输入到变频器中去,利用变频器内部的过程控制软件实现速度变换控制。
这种方法的缺点是对于大惯性负载,如烘缸的负载扰动超调量和动态恢复时间较长。对调整带来一定不便,在使用中还要保持一定的工艺条件稳定。如果工艺变化频繁或波动较大时,应转入开环控制。
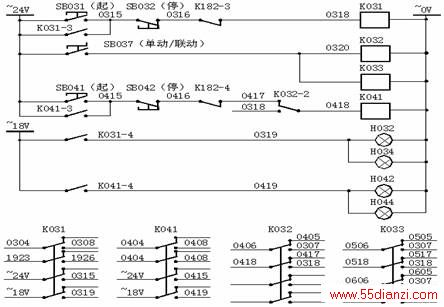
3.1.3继电控制
起/停和爬行/运行控制不进PLC,一方面节省I/O接口,另外也是工艺上适应的一种设计。不论纸机大小,都要求每一传动点能独立起/停和爬行/运行操作。所以,如果进入PLC进行连动设计,看起来自动化程度高了,但实际不实用。因为在全线开机时为了保证安全和设备的试运转,一般都采用单机起动或停止操作,这样有利于发现故障和减少事故。故障保护及指示回路同样采用继电回路设计。
3.2 系统的软件设计与功能实现
程序模块化结构设计,各种功能以子程序结构适时调用实现;程序采用循环扫描方式对速度链上的传动点进行处理,提高程序执行效率;程序设计通用性强,并具有必要的保护功能和一定的智能性。主程序的流程如图4示。
3.2.1速度链设计
(1) 速度链结构设计。速度链结构采用二叉树数据结构算法,先对各传动点进行数学抽象,确定速度链中各传动点编号,此编号应与变频器设定的地址一致。即任一传动点由3个数据(“父子兄”或“父子弟”)确定其在速度链中的位置,填入位置寄存器相应的数值。由此可构成满足该机正常工作需要的速度链结构。
(2) 算法设计。速度链的设计采用了调节变比的控制方法实现速度链功能,把压榨作为速度链中的主节点,该点速度即纸机的工作车速,调节其速度即调节整机车速。其它各分部点的速度由该点车速乘以相应的变比得到。由PLC检测其它分部车速调节信号,通过操作该部增、减按纽的操作改变其速比,则改变相应分部的车速。
3.2.2 负荷分配设计
该纸机传动结构上有柔性联结的传动点,烘缸部和压榨部。它们之间不仅要求速度同步还需要负载率均衡,否则会造成一个传动点由于过载而过流,而另一传动点则由于被带动而过压,影响正常抄纸,甚至可能撕坏毛布,损坏变频器、
机械设备。因此这两个传动部分的传动点之间需要负荷分配自动控制。

负荷分配工作原理:假设P1e、P2e为两台电机额定功率,Pe为额定总负载功率,Pe= P1e+P2e 。P为实际总负载功率,P1、P2为电机实际负载功率,则P= P1+ P2。系统工作要求 P1=P*P1e/Pe ,P2=P*P2e/Pe,
两个值相差≤3%。
由于电机功率是一间控制接量。实际控制以电机定子转矩代替电机功率进行计算。
PLC采样各分部电机的转矩,计算每一组的总负荷转矩,根据总负荷转矩计算负载平衡时的期望转矩值。计算平均负荷转矩方法如下公式所示。
M=
其中: ML1 、ML2 是压榨、烘缸电机实际输出转矩;
Pe1 、Pe2 是压榨、烘缸台电机额定功率;
M 为负荷平均期望转矩
PLC通过Modbus总线得到电机转矩,利用上述原理再施以PID算法,调节变频器的输出,使两电机转矩百分比一致。即完成负荷自动分配的目标。






