引言
目前,国内的塑料、橡胶等包装行业普遍采用连续型包装机,这种包装机使用成型模具进行包装封口,控制简单,但包装效率和成功率不高,而且模具检修不方便,因此,许多厂家转向开发使用间歇型包装机,降低废品率,提高包装效率,而且可以改变塑料袋包装长度。
本文介绍的包装机主机系统采用台达PLC作为控制系统核心,并以台达其他工控产品相配合,在传统包装机的基础上加以改进,实现间歇式包装,使得包装机包装速度提高,定位更准确,系统更加可靠、稳定,符合、满足现代包装行业的发展要求。
系统结构
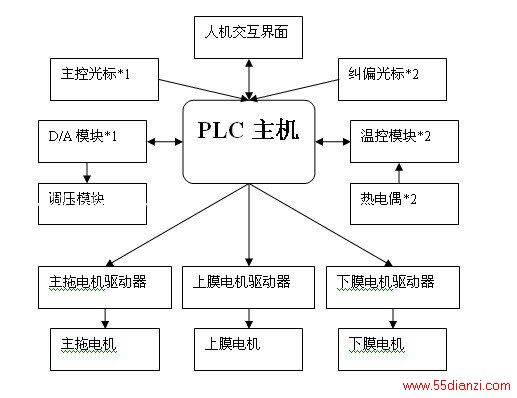
图1 包装机系统结构简图
由上面的结构图可以看出,PLC主机是本包装机控制系统的核心。在本系统中,人机交互界面负责主要操作功能按键和系统状态显示:行手自动切换、设置上下膜压封部分加热的目标温度、调压模块输出的对应电压、主拖电机和上下膜电机运行速比、显示当前机器运行中的包装数目、上下膜压封部分的检测温度和目标温度,压封切割状态等;热电偶采集上下膜压封部分的当前温度信息传递给温控模块,温控模块对这些信息进行处理后转移给PLC主机,最终显示在人机界面上;主控光标和纠偏光标通过检测包装袋上的光标标志,传递给PLC主机进行处理。
系统设计
按照预定设计要求,本包装机需完成进料、压封、切口、切割、计数等功能,主要包括以下几个部分:
可编程控制器
本系统PLC选用台达DVP28SV11T一台。该主机最多可连接16台(左侧扩展8台+右侧扩展8台)模拟、温度、轴控、通讯等特殊扩展模块,内设200kHz四轴独立与脉冲输出二组直线/圆弧插补的运动指令,让位置控制的应用要求可轻易达成。
表1 台达DVP28SV11T技术参数

由表1可以看出,台达DVP28SV11T具有4点高速脉冲输出,可以用于步进电机的驱动;内建RS232通讯和MODBUS通讯协议,可以同时连接人机界面和温度控制器;例外,该PLC支持外围扩展,可以连接DA模块和IO模块。
人机交互装置
本系统HMI选用台达DOP-AS57BSTD一台。人机交互界面通过RS232与PLC主机通讯。
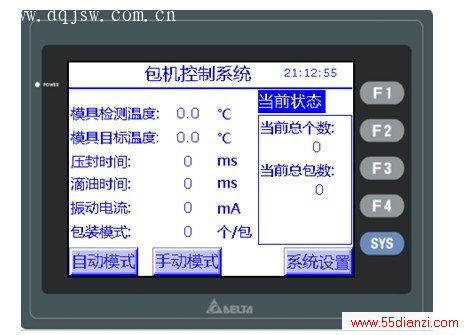
图2 控制系统运行主界面

图3 人机界面与DTC温控模块连接并修改DTC参数
温度控制装置
本系统温控模块选用台达DTC1000V和DTC2000V各一台。温控模块与PLC主机使用MODBUS ASCII进行通讯。
状态读取

图4 MODRD语句说明
使用MODRD语句可以从PLC中读取温控器的状态值,例如当前温度,目标温度等,可以通过改变参数n的值来设置读取的笔数。
需要指出的是,温控器的读取的相关数据储存在PLC主机寄存器的D1070~D1085中,由于是ASCII码数据,PLC会将这些数据转换成HEX即16进制数据存在PLC主机寄存器的D1050~D1055中,而MODRD语句就是将温控器中检测的信息数据读出传递给PLC的D1070~D1085寄存器进行处理。
在本包装机中,我们用MODRD语句读取两笔,分别是当前温度值和目标温度值。
参数写入
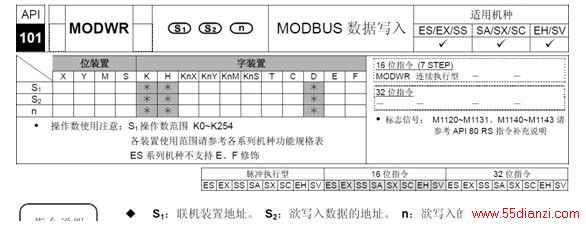
图5 MODWD语句说明
读写操作
同MODRD语句类似,MODWR可以实现温控器参数的写入。
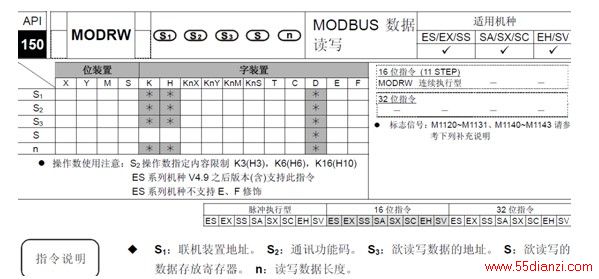
图6 MODRW语句说明
用MODRW语句可以通过MODBUS实现对DTC温控器参数的读取和写入。
电机驱动装置
本系统驱动步进电机是通过PLC主机发出PWM脉宽调制信号到步进电机驱动器,经步进电机驱动器来实现驱动步进电机运转的目的。本包装机选用的步进电机驱动器有多细分选择、正反转设置、驱动电流大小等参数可以设置。同时可以由PLC输出点控制步进电机运转方向和驱动步进电机的脉冲个数。
由于本包装机对包装误差要求比较严格,所以在选择步进电机硬件参数上需要特别注意,在PLC程序中也应该做到尽量优化。

图7 PLSY语句说明
在上下电机送膜阶段,上下膜电机一直转动送膜,同时主拖电机一直转动推动压封好的膜及待压封的膜前进,直到主控光标检测到停止位的光标标志,此时全部电机停止转动。
PLSY K1000 D20 Y0
此处,K1000表示脉冲输出频率为1KHz,输出脉冲个数为D20中存储的数值(可以在触摸屏上进行人工设置),Y0为输入点(在本包装机中为上膜电机)。例如设置D20=0,则PLC的Y0一直输出脉冲。

图8 电机正反转实现
默认情况下,电机正转,当步进电机驱动器对应的方向控制接点得电之后,电机反转。在包装机开始阶段的人工牵引上下膜阶段,需要实现电机的正反转来调整膜的位置。
误差调整设计
在本包装机控制系统纠偏功能中,使用了2个光标检测开关,分别检测上膜和下膜的光标标志,若发现二者检测到的开关量变化时间不同步,则说明上下膜存在移位偏差,此时,通过PLC主机程序对滞后膜(上膜或是下膜)对应电机加送脉冲个数,以此来补充滞后距离。
实验发现,以此种方式减小误差的方式有一定限制,需要注意补充脉冲发出的时间段。在运动中补充脉冲或是在上下膜压封阶段补充脉冲,二者具有一定的差距:前种方式可能会影响到压封的效果,因为当主控光标检测到分段标志的时候,立即进入切割环节,同时也是上下膜压封的时间,此时加送脉冲,由于“超前膜已经停止运动,而“滞后”膜的对应的脉冲还未用完,它对应的电机继续转动送膜,这样,容易导致滞后膜发生褶皱,容易导致次品甚至坏品的情况。而在压封阶段(此处主要是指检测到停止位光标,到正式压封前的一段时间内补送脉冲),可以获得较好的效果。
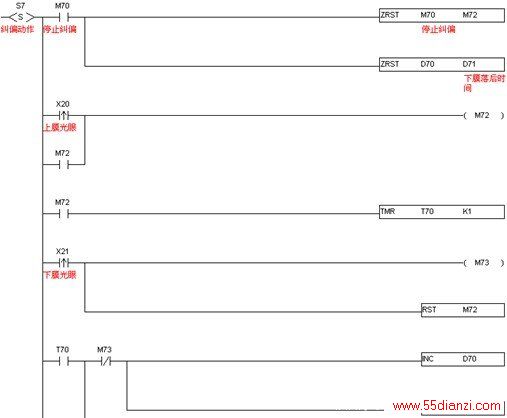


图9 纠偏部分测试程序
本测试程序以上膜超前,下膜滞后为例,通过定时器与计数器配合,实现测量上下膜的偏差时间,由于在送膜的过程中,膜的运转速度基本稳定,可以通过这一偏差时间乘以速度(这个速度可以在机电联合调试的实际得出),从而得到上下膜偏差距离,然后再根据步进电机的细分步数,求得应该滞后的下膜应该补充的脉冲个数。
结束语
本文介绍的间歇式包装机控制系统通过在本地某包装机械厂的实际应用中已获得成功,包装精度和包装成功率均达到预计要求。






