1.随着处理器、图像传感器、存储器和其它半导体器件的性能提高、成本下降与功耗减小,开发人员正针对各种系统形状因数和价格点,评估为它们增加嵌入视觉功能的情况。
2.传统基于图像传感器的设计可以支持很多嵌入视觉实现,但对于深度识别要求,通常需要一个3D图像传感器子系统。
3.深度映射的常见方法是立体传感器阵列,它将两个摄像头“固定”起来;结构光法是将一个预设的光模式投射到屏幕做分析;而飞行时间法则是通过投射光经过的时间(从源到物体,再返回传感器)计算出距离。
看一下你正在做的设计,或者更省事一点,看一下你的周边,你很可能会发现摄像机正在盯着你,甚至不止一台。图像传感器和它配套的图像处理器正在各种电子产品中日益普及。
例如,现在几乎不可能买到一款不带摄像头的笔记本电脑,而越来越多的一体机、专用计算机显示器,甚至电视机中都包含了摄像头。智能手机与平板电脑也更多地配上了图像传感器,通常前后都有,有时甚至采用“立体”配置以获取三维图像。甚至在便携媒体播放器和汽车内也能看到摄像头的存在。
丰富的应用
设计中增加摄像头的基本理由一般是实现基本的图像捕捉,尤其是静像、录像以及视频会议。但由于已经有很多图像构建块,软件与系统开发者也充分将它们用于更多新的用途,如根据内容识别含义,根据判读的信息采取动作。
例如在汽车应用中,先进的分析系统并不是简单地将后视摄像头捕捉的视频送到LCD屏幕上,它还会警告驾驶员在车后探测到了某个物体,更先进的系统甚至能紧急刹车以避免撞车的发生。
在汽车两侧和周围很多位置还可以安装更多的摄像头,用以提醒驾驶者,先进的实现还会采取措施,以避免无意的变道或与前方物体的碰撞。它们还可以解析出道路标志的含义,对驾驶者提出超速或可能发生碰撞的警告。摄像头能够实现对收音机和其它汽车子系统的手势界面控制,从而减少驾驶者的分心,它们可以发现正在打盹、发短信或做着其他分神的事的驾驶者,让他们把全部注意力放回道路上。
智能手机、平板电脑、计算机和电视用前置摄像头可完成不同功能。它们可以警告用户距离显示器过近或过远,或姿势不好。它们可以确保有人坐在显示器前时,显示屏背光一直亮着,而当人走开时,显示屏背光自动关闭。在这些例子和其它消费电子应用中,手势界面扮演着越来越重要的角色(如在游戏机中),它为传统的按钮按键、触摸板或鼠标的操作提供了一种补充(虽然不是替代)。
正面的摄像头可以用于监控呼吸,它量度胸腔的起伏节奏,并且通过探测血流引起的面部颜色微小的周期性变化测出心律。它可以监控眼球的移动,警告一个人喝酒过多了。它可以判断出一个出现在系统前的人是授权用户,自动为其登录,并装入特定账户的程序与设置。而后置摄像头则可以采用增强现实的手段,为某个物体或场景的普通视图提供额外的信息。
这些是嵌入视觉的典型例子,这个发展迅速的应用类型已扩展到专用功能设备,如监控系统和生产线检查设备等。有些情况下,过去是由运行PC操作系统的计算机执行视觉分析工作,但这种方法成本高、笨重、功耗大,并且不可靠。在其它一些情况下,任一或所有这些因素都会导致不可能实现视觉功能。
现在,由于处理器、图像传感器、存储器和其它半导体器件的性能提高、成本下降及功耗减小,开发人员可以针对各种系统规模和价格点,评估嵌入视觉的能力,这也提升了对越来越强健的图像子系统的需求。
距离还是分辨率
多年来, 消费数码相机市场的动力一直是“像素越多越好”的心态,由于这些图像传感器有大规模的批量,因而价格较低,所以也进入了很多嵌入视觉系统。但近年来,这种过分简单化选择策略的局限性已经越来越明显。
首先,消费者日益发现,除非他们要把照片放大打印到一整面墙那么大,或对源照片做严格的剪裁,否则根本不需要高分辨率的图像,高分辨率照片要占用庞大的存储空间。另外,现代相机拍出的高噪声照片或经人为修补的照片,揭示出了越来越高的分辨率的缺陷。
传感器尺寸必须保持很小以维持性价比,这是消费电子系统的一个重要特性。当制造商硬性在传感器中塞入更多像素时,可想而知,必须缩小单个像素的尺寸。在确定的时间量下,越小的像素获得的光子数越少,因此降低了光敏感度。这样不仅降低了相机的低光性能,同时也对系统动态范围产生了负面影响。后处理工作只能部分地补偿这种损失,通常是只采用运动修补和其它折中方法。
讽刺地是,嵌入视觉应用的需求倾向于采用较通用摄影更低的分辨率。例如,微软公司Kinect中使用的红外和可见光图像传感器都是VGA(640×480像素)分辨率的类型,而视觉外设只将QVGA(320×240像素)的深度图像传送给连线的游戏机或PC。
鉴于现代传感器中可用像素已经过剩,有些供应商转而采用非传统Bayer RGB模式的滤波器阵列方案,将多余像素用于提高光灵敏度和彩色精度(图1)。额外的(和改变的)滤波器颜色据说能提高全谱段上的单像素插值结果,而单色(或无滤波器)像素可以进入更多光线,付出的代价是没有了彩色识别能力(参考文献1)。
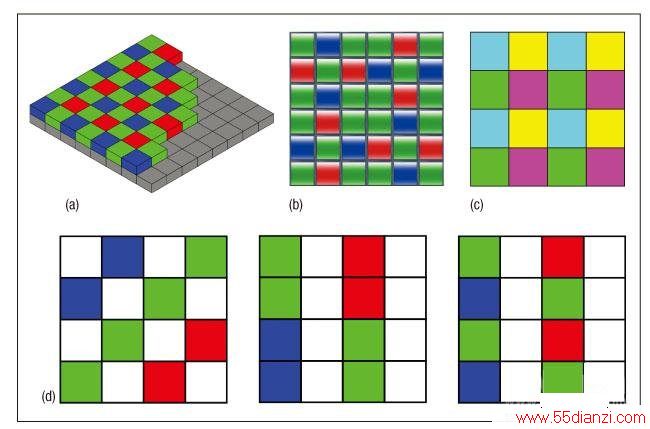
图1,Bayer传感器模式以一位柯达图像科学家的名字命名,它保留了数字影像应用中的
滤波器阵列方法(a)。更多现代方案则以一种随机方式增加了绿色光谱像素,以提高可见光频谱中这一最重要部分的细节(b),使用减色(代价是需要更多的后期处理),以提高滤波器的光传输能力(c),甚至为像素混合体增加无滤波器的单色像素(d)。
莱卡相机公司的最新数码相机将滤波器的变通做到了极致,它用自己的无滤波器单色图像传感器,仅捕捉黑白图像(图2a)。但即使在高ISO设置下,其照片锐度也获得了评论家们的支持。
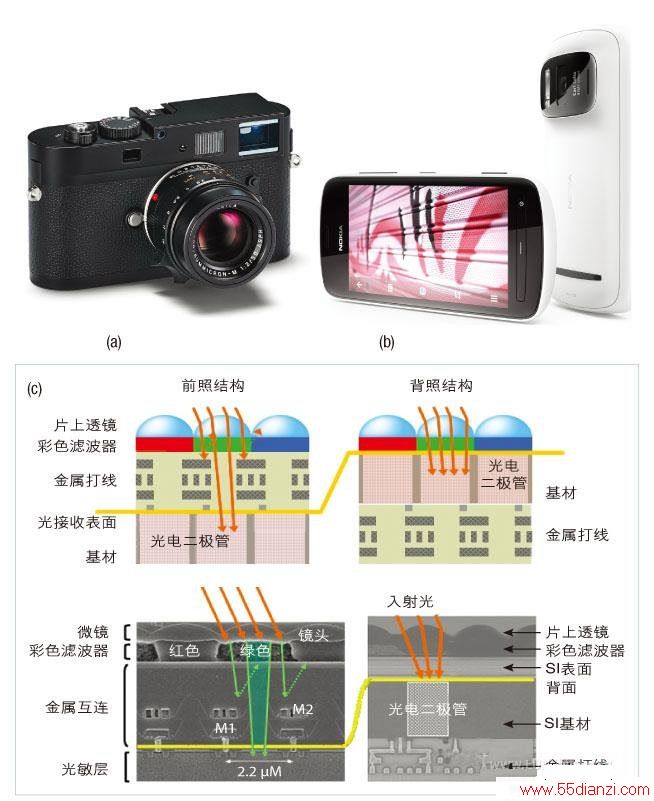
图2,LeICa公司的M Monochrom要价8000美元,只能捕捉到黑白图像,但评测者们都盛赞该相机的清晰度与低照度下的性能(a)。诺基亚808 PureView智能手机包含有一个超强的4100万像素图像传感器,用于实现数字变焦,以及集簇像素的光学收集能力(b)。索尼开发的名为背照的传感器设计技术,它将像素互连接线改到光电二极管背后,从而改善了每像素填充因素比(c)。
同时, 诺基亚公司的8 0 8PureView智能手机嵌入了一只4100万像素的图像传感器, 但缺省情况下只输出800万像素或更低分辨率的图像(图2b和参考文献2)。808PureView会根据数字变焦设置,将多个像素组合成为不同尺寸的簇,从而省掉了复杂、昂贵和笨重的光学变焦结构,并将实际的单像素光子收集能力提高了很多倍,改善了低光照下的性能。
索尼公司开发了一种称为背照的传感器设计技术(图2c)。撇开实现细节不谈,该技术是将像素间的连线布放到像素光电二极管的后面,从而改善了传感器单像素的填充因数(即感光面积占总面积的百分比),因此也提高了低光照性能。
深度识别
基于传统图像传感器的设计可以支持很多嵌入视觉实现。例如,它可以帮助解析基本手势,以及处理基本的面部探测与识别工作,通常也适用于光学字符识别功能。但是,它可能无法明确地探测出复杂的手势,如针对摄像头的进退运动(3D),因为手势被严格限制在垂直和水平面上(2D)。更常见的是,它不能完全分辨一个物体的整体,即深度;例如,它无法轻松区分出是真脸还是该人的照片。对于这类深度识别的需求,通常需要有一个3D图像传感器子系统(参考文献3)。
无论哪种3D传感器实现,常见的输出就是深度图,这是一个图像阵列,其中每个像素数据项(有时为了人类判读目的而要做附加的彩色编码)都代表着传感器与传感器前方某点之间的距离(图3)。每个深度图帧通常都配合一个由普通2D图像传感器捕捉的相应帧,两个帧要相互做视差校正,因为两台摄像头所处位置不同。
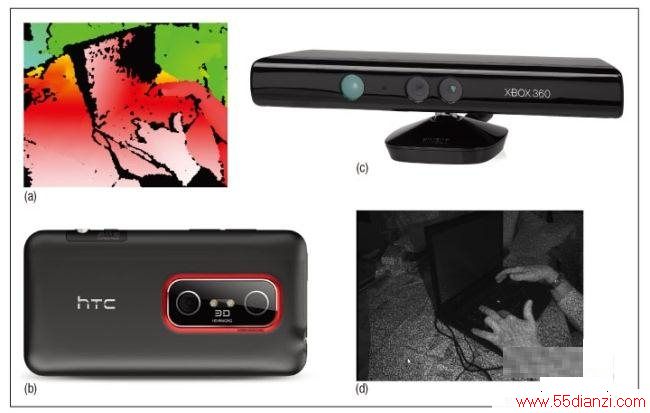
图3,无论采用哪种3D摄像头技术, 都能给出一个物体的深度图(a)。像HTC EVO 3-D智能手机这样的设备也可以用于3D嵌入视觉用途,该手机的立体传感器阵列主要用于捕捉3D静像和频图像(b)。微软的Kinect(c)采用的是结构光方法,测深的方法是在投影仪的前方投射一个知的红外光模式,然后分析它所看到椭圆的形状与方向(d)。
本文关键字:传感器 传感器,电子学习 - 基础知识 - 传感器
上一篇:FBG光学传感器






