电子控制部分的全部材料,与NE555寻光机器人相同,依然使用红外线接收管作为光敏器件,把它们反相串联,接在+3.7V电源与地之间。为了使控制部分获得足够的输出电流驱动电机,需要使用两片74HC240,把它们叠加焊接在一起工作。
控制核采用BEAM仿生机器人常用的“DEAD BUG”的焊接方式。使用这种手法建造电路的特点是把集成电路管脚朝上,在管脚上进行外围元件的搭棚焊接,它好处是可以迅速搭建起一个功能电路,另外完成的作品兼具一点艺术性。
我们可以把图6看做一个硅基的大脑,从电路功能和表现形式上都比较符合。注意把需要的连接外部设备的端口留出适当的长度,方便搭焊导线。图7为安在机器人头部的“大脑”特写,为了美观和增加气氛,我用塑料包装板给它做了透明盖。
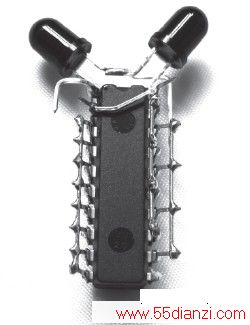
图6 为焊接完毕的控制核,顶视图
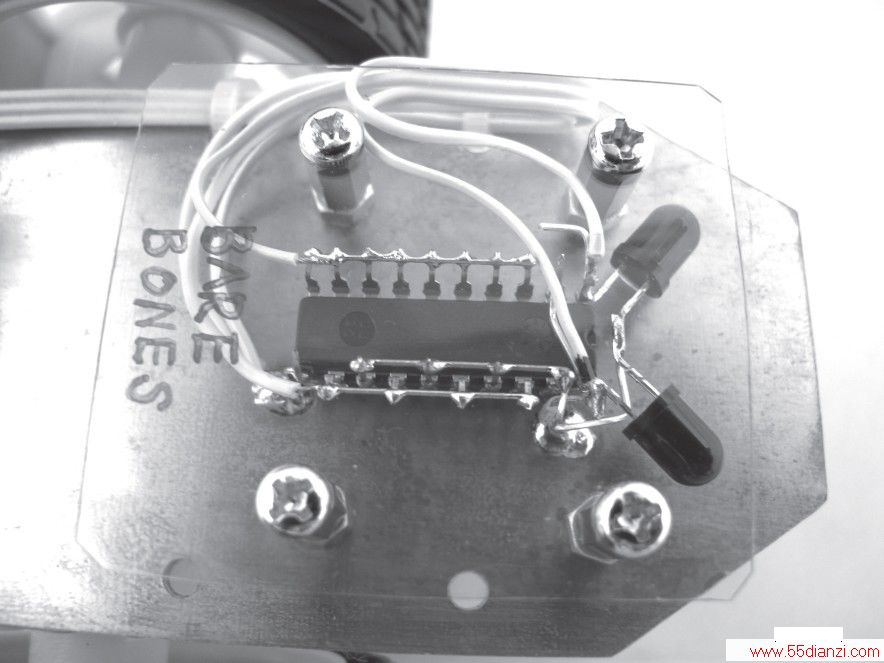
图7 机器人的大脑
图8为机器人底部,锂电池直接粘在减速电机上。因为74HC240的工作电压范围比较宽2~6V,这样在电源的选择上就很灵活,可以使用我偏好的3.7V锂电池。而NE555的最低工作电压是4.5V,在电源的选择上就有很大的局限性。图9为总体装配完毕的74HC240寻光机器人。
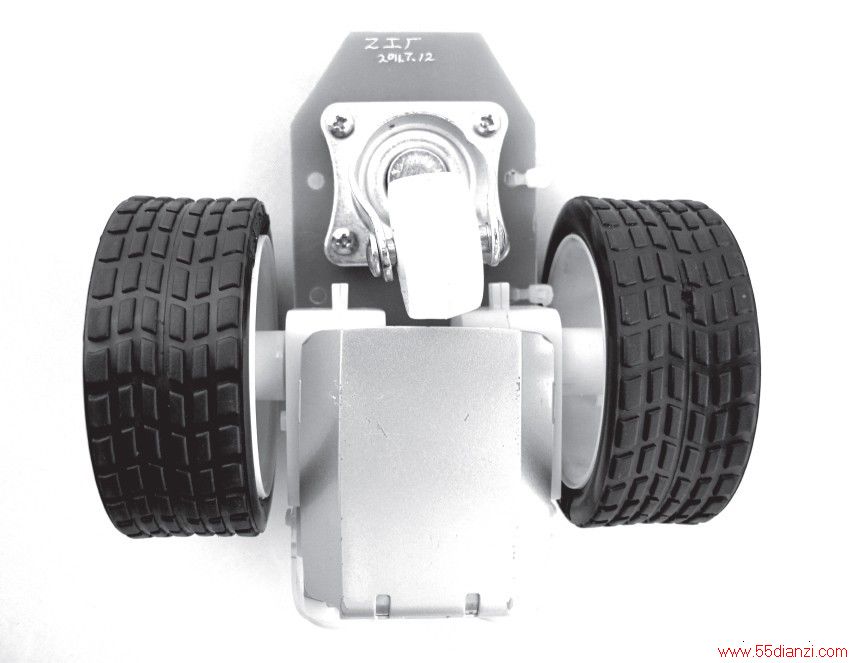
图8 机器人底部
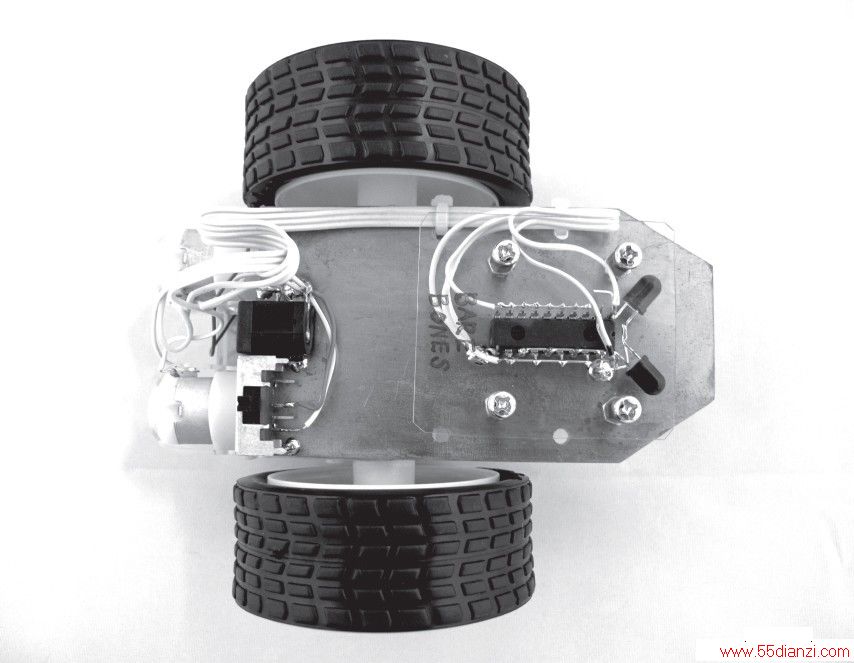
图9 74HC240寻光机器人
机器人的运行效果
74HC240寻光机器人的运行效果要优于NE555寻光机器人。根据光线的变化,机器人的步态呈现出一种不规则的步进形式,非常类似单片机控制下的PWM电机驱动效果,只是74HC240机器人的步态完全是自发的。通过仔细的观察,机器人的主要行为模式可以总结为:当它向着一个固定光源前进,没有周围的干扰,两个电机将以左右交替触发的方式步进运转,每执行一步,轮胎转动的角度大概在30~350°(取决于光源强度)。从能量的利用角度看,它也优于NE555寻光机器人,74HC240机器人的两只电机是缓冲器分别触发启停,间歇工作,非常经济。而NE555机器人的两只电机是串联在电源里,启停会互相牵制,造成执行效率降低和能量的浪费。我使用的是一块手机拆下的800mAH的锂电池(实际容量小于800mAH),充满实测机器人的持续运行时间超过90分钟。
题图是NE555寻光机器人和74HC240寻光机器人的全家福,图左为74HC240寻光机器人,图右为NE555寻光机器人。由图片的对比中,读者可以看出74HC240版本的升级。机器人制作是一项实践性极强的爱好,需要多加动手实践,才能体会到电路和结构的特点。把书本上的理论知识与工程实践结合起来,通过这两个简易寻光机器人的制作,你会发现,机器人不再是一个高不可攀的话题。
上一篇:AVR单片机并口下载线的制作






