 式中n-步进电动机转换拍数(N>n)
g.应用闭环驱动,效率可增到7.8倍,输出功率可增到3.3倍,速度可增到3.6倍。
闭环驱动的步进电动机的性能在所有方面均优于开环驱动的步进电动机。步进电动机闭环驱动具有步进电动机开环驱动和直流无刷伺服电机的优点。因此,在可靠性要求很高的位置控制系统中,闭环控制的步进电动机将获得广泛应用。
3编码器形式的步进电动机阕环控制系统
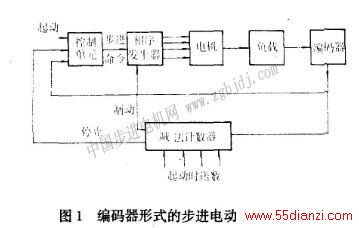
步进电动机的闭环控制最早是采用编码器的形式,图1是其原理示意图。初始状态,系统受一相或几相激磁而静止。开始工作后,先把目标位置送入减法计数器;然后,“起动”脉冲信号加到控制单元上,控制单元在“起动”脉冲的作用下,立即把步进命令送入相序发生器,使激磁变化一次,后续的脉冲则由编码器装置产生。编码器每产生一个脉冲,就对法计数器减1,因而,减法计数器记录的是实际的转子位置。当减法计数器的计数减至零时,发出一个停止信号到控制单元,禁止以后的步进命令,系统停止工作。
式中n-步进电动机转换拍数(N>n)
g.应用闭环驱动,效率可增到7.8倍,输出功率可增到3.3倍,速度可增到3.6倍。
闭环驱动的步进电动机的性能在所有方面均优于开环驱动的步进电动机。步进电动机闭环驱动具有步进电动机开环驱动和直流无刷伺服电机的优点。因此,在可靠性要求很高的位置控制系统中,闭环控制的步进电动机将获得广泛应用。
3编码器形式的步进电动机阕环控制系统
步进电动机的闭环控制最早是采用编码器的形式,图1是其原理示意图。初始状态,系统受一相或几相激磁而静止。开始工作后,先把目标位置送入减法计数器;然后,“起动”脉冲信号加到控制单元上,控制单元在“起动”脉冲的作用下,立即把步进命令送入相序发生器,使激磁变化一次,后续的脉冲则由编码器装置产生。编码器每产生一个脉冲,就对法计数器减1,因而,减法计数器记录的是实际的转子位置。当减法计数器的计数减至零时,发出一个停止信号到控制单元,禁止以后的步进命令,系统停止工作。
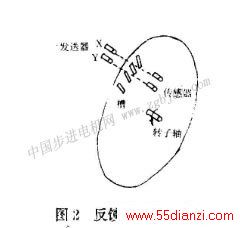
 对于低分辨率的步进电动机,通常使用一个开了槽的圆盘和光电传感器作为反馈编码器的组合件,如图2所示,槽口的数目等于电机每转所走的步数。
对于低分辨率的步进电动机,通常使用一个开了槽的圆盘和光电传感器作为反馈编码器的组合件,如图2所示,槽口的数目等于电机每转所走的步数。
 对于高分辨率的步进电劭机,则需采用高分辨率的增量编码器,如旋转变压器增量编码器,感应同步器增量编码器等。
由于反馈编码器价格昂贵,而且为了把编码器安放到步进电动机的轴上,要求系统具有更大的体积,这二大缺陷限制了编码器形式的步进电动机闭环控制系统的应用。
4波形检测形式的步进电动机闭环控制系统
波形检测形式的步进电动机闭环控制系统的原理是通过对步进电动机相电流或绕组反电势(或绕组反电势所引起的电流)的检测,间接得到转子位置信息,反馈到控制单元产生控制脉冲,控制步进电动机运动。
对于高分辨率的步进电劭机,则需采用高分辨率的增量编码器,如旋转变压器增量编码器,感应同步器增量编码器等。
由于反馈编码器价格昂贵,而且为了把编码器安放到步进电动机的轴上,要求系统具有更大的体积,这二大缺陷限制了编码器形式的步进电动机闭环控制系统的应用。
4波形检测形式的步进电动机闭环控制系统
波形检测形式的步进电动机闭环控制系统的原理是通过对步进电动机相电流或绕组反电势(或绕组反电势所引起的电流)的检测,间接得到转子位置信息,反馈到控制单元产生控制脉冲,控制步进电动机运动。
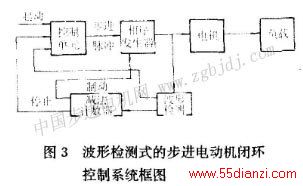 图3是其原理图。波形检测器是由简单的电子线路构成,价格便宜,如果需要,可直接安装在控制器逻辑线路中,步进电动机不需附加的机械连接。
4.1利用电流检测的步进电动机闭环控制系统
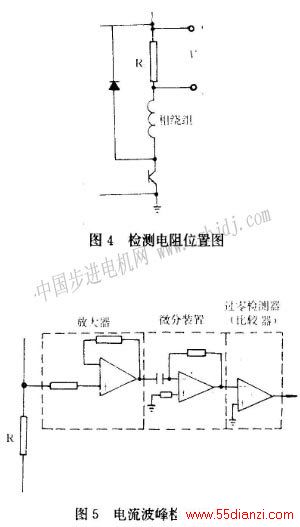
用电流检测的步进电动机闭环控制是基于某些反应式步进电动机的相电流在一定速率范围内出现正的或负的极值这一概念进行的。对系统加初始起动脉冲,电机起动,当相电流出现极值的瞬间,波峰检测线路瞬时产生一个脉冲或者定时信号,反馈给控制单元,作为后续脉冲,实现了步进电动机的闭环控制。值得注意的是,电机导通相电流和截止相电流均可能出现若干个波峰,应在哪一种状态下进行检测,可根据电机的实际运行确定。如图4所示,电流检测可通过在电流回路中插入一个已知阻值的小电阻,测量电流通过时的电压实现。波峰检测线路一般均采用模拟微分法,波峰用di/dt经过零值表示。检测原理图如图5所示。
图3是其原理图。波形检测器是由简单的电子线路构成,价格便宜,如果需要,可直接安装在控制器逻辑线路中,步进电动机不需附加的机械连接。
4.1利用电流检测的步进电动机闭环控制系统
用电流检测的步进电动机闭环控制是基于某些反应式步进电动机的相电流在一定速率范围内出现正的或负的极值这一概念进行的。对系统加初始起动脉冲,电机起动,当相电流出现极值的瞬间,波峰检测线路瞬时产生一个脉冲或者定时信号,反馈给控制单元,作为后续脉冲,实现了步进电动机的闭环控制。值得注意的是,电机导通相电流和截止相电流均可能出现若干个波峰,应在哪一种状态下进行检测,可根据电机的实际运行确定。如图4所示,电流检测可通过在电流回路中插入一个已知阻值的小电阻,测量电流通过时的电压实现。波峰检测线路一般均采用模拟微分法,波峰用di/dt经过零值表示。检测原理图如图5所示。
 4.2利用反电势检测的步进电动机闭环控制系统
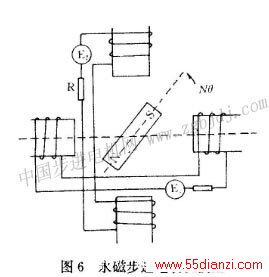
永磁步进电动机利用反电势检测的闭环控制系统具有其优越性。一台永磁步进电动机从实质上讲,就是一台交流两相同步电动机,可用图6所示的模墅描述。
4.2利用反电势检测的步进电动机闭环控制系统
永磁步进电动机利用反电势检测的闭环控制系统具有其优越性。一台永磁步进电动机从实质上讲,就是一台交流两相同步电动机,可用图6所示的模墅描述。
 相绕组的电压方程可表示成:
相绕组的电压方程可表示成:
 式中L——回路电感
R——回路电阻
Ii——相电流
θ——转子角位移
N——转子齿数
K——转矩常数
Ei——加在第i相上的电压
在电压方程里,-KsinNθ.θ和KcosNθ.θ是由于电机旋转时在绕组中产生的反电势。转子位置信号体现在反电势的相位上(sinNθ和cosNθ)。转子的速度可由反电势的幅值得出或根据反电势的频率计算。因此,从反电势中,可得到足够的控制电机性能的信步进电动机的闭环控制系统号。
由于步进电动机绕组中的反电势反映了转子的角位置和角速度,因此,构成反馈的关键是重新得到反电势波形,以便对其进行检测,产生后续脉冲。重现反电势波形的方法有两种:
a.辅助线圈法
辅助线圈法的原理如图7所示,这个图示出的仅是1相的回路,检测线圈对绕在定子极上,检测线圈内产生的电压可写成:
式中L——回路电感
R——回路电阻
Ii——相电流
θ——转子角位移
N——转子齿数
K——转矩常数
Ei——加在第i相上的电压
在电压方程里,-KsinNθ.θ和KcosNθ.θ是由于电机旋转时在绕组中产生的反电势。转子位置信号体现在反电势的相位上(sinNθ和cosNθ)。转子的速度可由反电势的幅值得出或根据反电势的频率计算。因此,从反电势中,可得到足够的控制电机性能的信步进电动机的闭环控制系统号。
由于步进电动机绕组中的反电势反映了转子的角位置和角速度,因此,构成反馈的关键是重新得到反电势波形,以便对其进行检测,产生后续脉冲。重现反电势波形的方法有两种:
a.辅助线圈法
辅助线圈法的原理如图7所示,这个图示出的仅是1相的回路,检测线圈对绕在定子极上,检测线圈内产生的电压可写成:
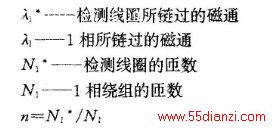 变压器的初级线圈与定子绕组相串联,次级线圈的感应电压可写成:
变压器的初级线圈与定子绕组相串联,次级线圈的感应电压可写成:
 设计咒值和Mi值使其满足关系式nL=M1,则电压V1可写成:
设计咒值和Mi值使其满足关系式nL=M1,则电压V1可写成:
 这意味着1相中的反电势可在两个相连线圈的两端重现。2相中的反电势可同样以V2 =nKcosNθ.θ形式检测。
b.逻辑仿真法
逻辑仿真法是通过一个运算放大器线路重现绕组中的反电势,利用式(1)可以得到反电势的表达式:
这意味着1相中的反电势可在两个相连线圈的两端重现。2相中的反电势可同样以V2 =nKcosNθ.θ形式检测。
b.逻辑仿真法
逻辑仿真法是通过一个运算放大器线路重现绕组中的反电势,利用式(1)可以得到反电势的表达式:

上一篇:五相混合式步进电动机的特征






