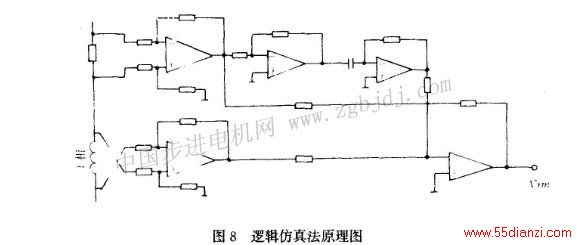
 利用辅助线圈法和逻辑仿真法得到反电势Uim后,就可对反电势波形进行检测。反电势波形是一正弦波,利用过零比较器,对其正向过零点进行检测,产生脉冲,反馈到控制单 元,作为后续脉冲,就可形成闭环控制。
这种反电势检测形式的闭环控制,在低速运行时是很难的,因此,在实际运行时,需要开、闭环结合使用。
4.3利用反电势电流检测的步进电动机闭环控制系统
检测由绕组反电势所引起的电流,从而进行闭环控制,是一种线路比较简单的闭环
控制方法。设I为电机一相绕组中的实际电流,Is为堵转时绕组中的电流,Id为二者的差值,它是仅存在反电势时,绕组中的电流,一般称作反电势电流。
利用辅助线圈法和逻辑仿真法得到反电势Uim后,就可对反电势波形进行检测。反电势波形是一正弦波,利用过零比较器,对其正向过零点进行检测,产生脉冲,反馈到控制单 元,作为后续脉冲,就可形成闭环控制。
这种反电势检测形式的闭环控制,在低速运行时是很难的,因此,在实际运行时,需要开、闭环结合使用。
4.3利用反电势电流检测的步进电动机闭环控制系统
检测由绕组反电势所引起的电流,从而进行闭环控制,是一种线路比较简单的闭环
控制方法。设I为电机一相绕组中的实际电流,Is为堵转时绕组中的电流,Id为二者的差值,它是仅存在反电势时,绕组中的电流,一般称作反电势电流。
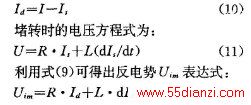 在仅考虑绕组外加励磁电压(矩形波)的基波成分是,Id可以写成
在仅考虑绕组外加励磁电压(矩形波)的基波成分是,Id可以写成
 式中ω——转角角速度(ω=θ)
闭环控制所需的反应脉冲可通过Id波形过零检测实现.电流差值信号Id则利用图9所示电路产生
式中ω——转角角速度(ω=θ)
闭环控制所需的反应脉冲可通过Id波形过零检测实现.电流差值信号Id则利用图9所示电路产生
 无论是采取编码器形式,还是采取波形检测形式,要构成闭环检测,形成后续脉冲.但是,要构成闭环系统,单单能形成后续脉冲还是不过的,还必须能正确地悬着转换角,即选择形成检测脉冲的位置。
5转换角的选择
通常转换角小时所产生的稳态转速较高,而且不同运行频率下,能够产生最大(或最小)稳态转矩的转换角是不一样的。
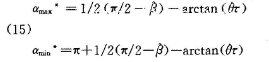
设第K相的稳定平衡位置为靠不稳定平衡位置为阪,励磁位置为θK,则转换角α=θKon -θK,重叠角β=θkoff一θk+lon。β值一定时,即β=β时,能够产生极值平均转矩的转换角α,可表示成:
无论是采取编码器形式,还是采取波形检测形式,要构成闭环检测,形成后续脉冲.但是,要构成闭环系统,单单能形成后续脉冲还是不过的,还必须能正确地悬着转换角,即选择形成检测脉冲的位置。
5转换角的选择
通常转换角小时所产生的稳态转速较高,而且不同运行频率下,能够产生最大(或最小)稳态转矩的转换角是不一样的。
设第K相的稳定平衡位置为靠不稳定平衡位置为阪,励磁位置为θK,则转换角α=θKon -θK,重叠角β=θkoff一θk+lon。β值一定时,即β=β时,能够产生极值平均转矩的转换角α,可表示成:
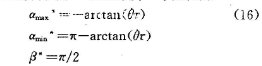
 当α、β均不定时,能够产生极值表示成:
当α、β均不定时,能够产生极值表示成:
上一篇:五相混合式步进电动机的特征






