内容摘要:同步轨道卫星共位是指在一个地球同步轨道±0.1°的窗口上放置两颗或两颗以上的卫星。文中介绍了同步轨道卫星多星共位的必要性和连接端站干涉测量的原理。对同步轨道共位卫星位置测量精度进行分析,得出结论,连接端站干涉测量技术能够满足同步轨道共位卫星位置测量的要求。
关键词:地球同步轨道卫星;多星共位;连接端站干涉;同波束干涉
地球同步轨道卫星具有相对地球为“静止”的特点,可以有效地利用其为通讯、数据传输、电视广播、气象、海洋探测、导航和军事等行业和科学研究服务,并已发挥显著的应用价值和经济价值。截至2005年,地球同步轨道附近约60 km宽的区域内共有卫星1 120个。随着各国对同步轨道卫星需求的增加,同步轨道位置日趋紧张,提高地球同步轨道弧段利用率越来越受重视。
同步轨道多星共位可以解决同步轨道卫星需求的增长,可以提高地球同步轨道弧段利用率。所谓“多星共位”,就是在东西、南北方向均为±0.1°窗口放置两颗或两颗以上同步卫星。20世纪80年代末到90年代初,ESA的Olympus通信卫星和德国一颗、法国两颗卫星共位运行。1992年德国科学家提出了在同一轨道窗口内放置7颗同步卫星的方案设想。为避免卫星飘出共位窗口,需要对窗口内的卫星确定绝对位
置;为提高同一个窗口的卫星数量,避免卫星间发生碰撞,需要精密测量卫星间的相对位置。
1 共位卫星位置确定原理
目前,国内同步轨道卫星绝对位置高精度确定主要采用相距几千公里的多个测量站,通过双边距离转发测量目标到各测量站的距离进行定位。星群、星座等卫星间的相对位置主要采用星问微波、激光测量方式。双边距离转发测量同步卫星的绝对位置,各测量站距离太远,不利于满足共视条件和安排观测任务。星间微波、激光测量方式需要星上装载测量设备,已经在轨的卫星不能实现。下面介绍一差分连接端站干涉技术(CEI),可以同时实现同步轨道共位卫星绝对位置和相对位置测量。
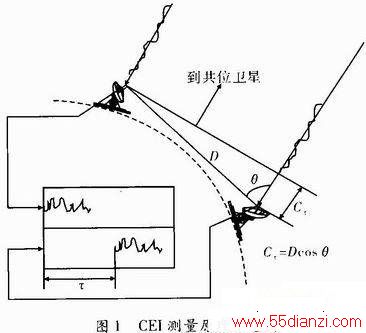
CEI属于角度测量系统,可用于航天器的导航测量。两个地面站被动接收同一个无线电信号源,参照共同的参考频率得两站所收信号的相位差,由此导出信号源到两站的距离差(DOR),结合两站的高精度基线长度,从而获得导航所需的信号源至基线的方向角θ,利用两条非平行的基线可以测得飞行器的两个方向角的测量值,如图1所示。对于共位卫星的测量可以增加一个测距信息,如采用一主两副的CEI系统,主站发出上行信号,通过共位卫星转发后,主站和两个副站同时接收转发下来的信号。一方面主站通过收发信号的时延,得到主站到共位卫星的距离R;另一方面,通过比较主副站接收信号的相位延迟,得到共位卫星到主副站的距离差r,从而形成Rr1r2测量体制。该测量体制要求站间基线不能过长,站间要求有同一时钟参考频率,或要求较高的时钟同步精度。
采用CEI对同步卫星的绝对位置测量由于存在基线、对流层、电离层、时钟等误差,测量精度较低。可以采用差分CEI测量技术,抵消各种测量误差,提高测量精度。差分CEI工作原理如图2所示,测量差分单向差分距离△DOR和差分单向多普勒△DOD。
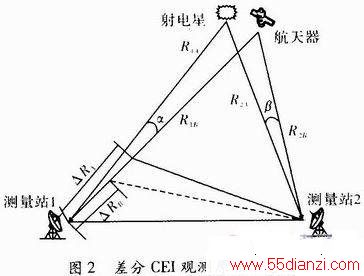
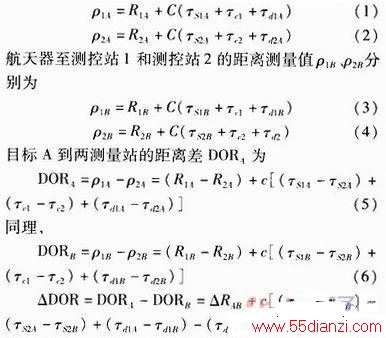
设C为光速;R1A和R2A为射电星到测控站1和测控站2的单向距离;R1B和R2B为航天器到测控站1和测控站2的单向距离;τc1、τc2为测控站1和测控站2的时钟误差;τS1A、τS2A、τS1B、τS2B为射电星和卫星B至测控站1和测控站2由大气、等离子等介质差引入的传输时延误差;τd1A、τd1B、τd2A、τd2B为测控站1、测控站2接收航天器A、B的接收设备时延。
射电星至测控站1和测控站2的距离测量值ρ1A、ρp2A分别为


2.2 共位卫星相对位置测量精度分析
甚长基线干涉测量(VLBI)系统是目前测量精度最高的测量系统,采用甚长基线干涉测量系统,同波束干涉测量精度经过分析可达36 prad,满足同步轨道共位卫星相对位置精度需求。但VLBI测量需要远程传输,不能实时处理,并且安排观测比较困难。这里采用CEI系统分析同步轨道共位卫星相对位置的测量精度。
文献对深空探测SBI测量差分相对距离误差进行了详尽的分析。误差源包括太阳等离子体、电离层、对流层等引起的传输时延误差,系统噪声、相位漂移、航天器晶振漂移、未校准群时延或时钟偏差引起的地面站测量误差,基线误差引起的测量误差。同步轨道卫星是近地卫星,金星、火星等太阳行星旁航天器目标不同,它受太阳等离子体影响很小,可以或略不计。
本文关键字:测量 GPS定位技术,电子知识资料 - GPS定位技术
上一篇:GPS应用方案及输电线路移动巡检






