内容摘要:为了简便有效地对光电产品进行检测,在地面模拟飞机实际飞行环境下进行地面运动目标跟踪精度试验,提出了将目标的GPS位置信息转换为产品坐标系下的坐标的变换方法,经过Matlab仿真计算,这种变换方法得到的目标基于产品的方位、俯仰角符合实际情况,适合计算跟踪精度。
随着航空技术的发展,光电产品在军事领域的作用越来越广泛,如何简便而有效地检测光电产品的性能是一个重要的课题。通常,红外和电视产品的检测是在飞机实际飞行情况下,通过机载光电吊舱进行检测,这种检测方法精度高,但是成本也很高。在地面模拟这种机载环境进行试验可以大大降低成本,地面运动目标跟踪精度试验就是在地面试验场中对红外和电视产品探测、跟踪性能的一种检测手段。
要在地面模拟机载环境,需要利用转台来模拟飞机实际飞行时对产品跟踪目标能力的干扰,将待测产品固定于转台上,对地面上运动目标进行跟踪,在目标上装有GPS,这样可以实时得到目标的位置信息,跟踪精度即为每个时刻目标实际运动过的角度与产品跟踪目标所转过的角度之差。所以,如何得到目标相对于产品实际运动过的角度是问题的关键,GPS产生的数据是目标每个时刻的经度、纬度、高度,需要将这些数据转换为产品坐标系下的角度,这就需要进行不同参考坐标系的坐标变换。
1 坐标系定义
1. 1 地心直角坐标系
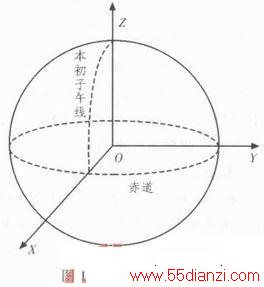
地心直角坐标系是一种惯性坐标系,坐标系的原点0选在地球质心。X轴指向地球本初子午线与赤道的交点;Z轴与地球的极轴重合,指向北极;Y轴与0XZ面垂直,Y轴与Z、X轴构成右手坐标系,如图1所示。
1.2 地理坐标系
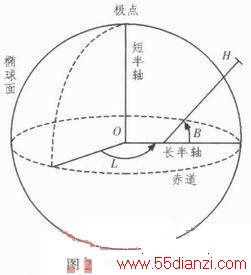
地理坐标系采用经度、纬度、大地高度表示空间点的位置。经度的定义为该空间点与参考椭球的自转轴所在的面与参考椭球的本初子午面的夹角,纬度的定义为该空间点与参考椭球面的法线与赤道面的夹角,大地高度为空间点沿着参考椭球的法线方向到参考椭球面的距离。目标上的GPS产生的数据即为地理坐标系下的经度L、纬度B、高度H,如图2所示。
1. 3 NED坐标系
NED是一种局部坐标系,其原点设在载体质心上。N为地理指北针方向;E为地球自转切线方向;D为载体质心指向地心的方向。NED坐标系是一种局部稳定坐标系,不是一种严格的惯性坐标系。因为当运动平台经过地球表面时,坐标系中的D轴将缓慢地改变它在空间的指向。然而,除了在北极附近外,这种转动的影响可以忽略不计。因此,对运动平台来说,NED坐标系是一个近似惯性坐标系。这种坐标系不仅特别适用于空载系统,而且也适用于地面或者舰载跟踪系统。
在地面运动目标跟踪精度试验中,产品跟踪目标转过的角度就是基于以产品质心为原点的坐标系下的值。
2 坐标系变换
在已知目标与产品位置信息(GPS信息)的情况下,需要将目标的L,B,H转换到坐标系下,直接进行坐标系的变换很难实现,这一转换需要借助地心直角坐标系做为中间量,先把地理坐标系中的L,B,H转换到地心直角坐标系下,然后再通过地心直角坐标系NED与坐标系的关系,转换到NED坐标系。
2.1 地理坐标系与地心直角坐标系
GPS定位的数据为经度L、纬度B和高度H,则在地心直角坐标系中的坐标为:
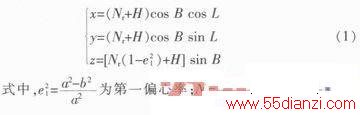
a为长半轴;b为短半轴。
由此,可以根据产品和目标的GPS信息(L0,B0,H0)、(L1,B1,H1)得到产品和目标在地心直角坐标系下的坐标,分别为X0=(x0,y0,z0),X1=(x1,y1,Z1)。
2.2 NED坐标系与地心直角坐标系
从NED坐标系到地心直角坐标系的转换需要两步,包括坐标旋转与坐标平移。
1)坐标旋转
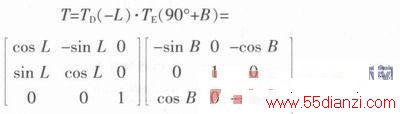
从坐标系到地心直角坐标系的坐标旋转关系,如图3所示。
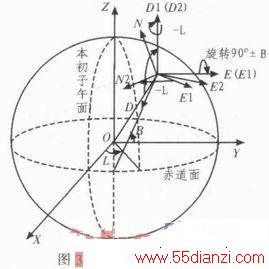
其旋转矩阵为:
2)坐标平移
平移量即为产品在地心直角坐标系的坐标到地心直角坐标系原点的值,也就是产品位置相对于地心的值,为X0=(x0,y0,z0),由此可以得到目标在地心直角坐标系下的坐标:

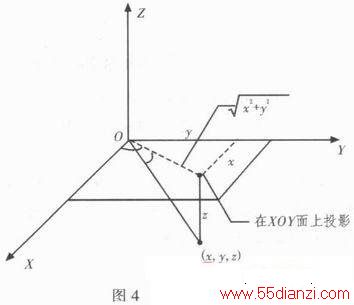
其中,X=(x,y,z)为目标在以产品为原点的NED坐标系下的坐标。

由(4)式得到X=(x,y,z),相对于产品观测点,如图4所示,目标在实际运动时转过的方位角和俯仰角分别为:

求得目标实际转过的角度之后,与产品跟踪目标所转过的方位、俯仰角之差即为所求的产品的跟踪精度。
3 仿真分析
假设西安某地,产品的CPS数据信息为北纬39°45’,东经108°56’,高度为400 m,目标的初始位置在产品的正南方向600 m处,纬度为北纬39°44’40”,高度为300 m。
首先将经纬度换算成小数,则产品信息L0为108.93°,B0为39.75°,H0为400;目标信息L1为108.93°,B1为39.744°,H1为300。
采用Matlab进行仿真,目标经过坐标系变换后在产品坐标系下的坐标近似为(-666.21,0,100.03),求得方位角近似为0 rad,俯仰角为0.149 rad。
当目标沿着正南方向运动时,产生一组位置信息,经过Matlab计算,对应的坐标和方位、俯仰角如表1所示。

经过Matlab仿真计算的结果符合实际情况,可以用于地面运动目标动态跟踪精度试验中跟踪精度的计算。
4 结论
本文通过对不同参考坐标系之间转换关系的研究,得到了将目标的GPS位置信息转换为目标基于产品坐标系下的方位、俯仰角的解算方法,从而可以与产品输出的角度进行对比,得到光电产品对地面运动目标的动态跟踪精度。使用这种方法可以在地面模拟机载环境,进行地面运动目标跟踪精度的试验,简便有效。
上一篇:智能汽车的设计要素解析






