6)直接将功率计附加至RF矢量信号发生器
并移除所有的衰减器与连接线。
7)将RF产生器设定必要数值,使其最后功率达到-136dBm.
而程序设计的数值应为-58.59dBm,即由-136dBm+71.41dB而得。
8)以功率计测量最后功率。
请注意,所测得的RF功率,将因仪器的功率精确度而有所不同。即使测得-58.59,则实际结果亦将因仪器的不确定性而产生些许变化。
9)调整产生器功率直到功率计读出-58.59dBm
虽然RF产生器可于一定的容错范围内进行作业,但此数值不仅具有可重复性,亦可调整RF功率计进行校准,直到得出合适的数值为止。
透过上述方法,仅需3项RF功率测量作业,即可决定所需的RF功率。因此,假设测量装置具有±0.2dB的不确定性,则可得出–136dBm的功率不确定性将为±0.6dBm(3x0.2)。
PartB:灵敏度测量
现在校准RF测量系统的功率之后,接着仅需进行RF产生器的程序设计,将功率强度设定足以让接收器回传最小的C/N.虽然用于测量灵敏度的RF功率将因接收器而有所不同,但是接收器C/N与RF功率的比值,将呈现完美的线性关系。在我们的测试中,可假设所需的C/N为28dB-Hz以进行定位。透过等式12,即可得出接收器C/N比值与噪声指数之间的关系。
假设卫星功率稳定,则可发现由接收器回报的C/N比,几乎就等于接收器的噪声指数函式。下表显示可达到的多样C/N比值。
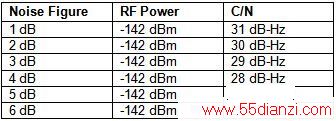
图16.C/N为噪声指数的函式
一般来说,接收器上的GPS译码芯片组,将得出定位作业所需的最小C/N比值。然而,又必须透过整组接收器的噪声指数,才能决定目前功率强度所能达到的C/N比值。因此,当测量灵敏度时,必须先了解定位作业所需的最小C/N比值。
其实有多种方法可测量灵敏度。如上表所示,RF功率与灵敏度具有直接相关性。因此,可根据现有的灵敏度功率强度,测量接收器的C/N比值;亦可根据不同的RF功率强度,得出系统灵敏度。
为了说明这点,则可注意RF信号功率与GPS接收器C/N比值,在不同功率强度之下的关系。下方测量作业所套用的激发,即忽略了第一组LNA而进行,且接收器的整体噪声指数约为8dB.而图17显示相关结果。

图17.接收器的C/N比值为RF功率的函式
如图17所示,此测量范例的RF功率与C/N比值,几乎是呈现完整的线性关系。而若使用高输入功率模拟C/N比值,将产生例外情况;接收器报表将出现可能的最大C/N值。然而,因为在任何条件下,进行实验的芯片组均不会产生超过54dB-Hz的C/N值,所以这些结果均属预期范围之中。
根据图7中所示RF功率与灵敏度之间的线性关系,其实仅需针对接收器模拟不同的功率强度,即可进行GPS接收器的生产测试作业。若接收器在-142dBm得出28dB-Hz的C/N值,则亦可于-136dBm得到34dB-Hz的C/N值。若特别注重测量速度,则可使用较高的C/N值,再从结果中推断出灵敏度的信息。
找出噪声指数
而由图17所示,接收器的噪声指数将直接与RF功率强度与载噪比互成比例。根据此关系,我们仅需针对RF功率强度与C/N进行关联性,即可测量芯片组的噪声指数。而此项测量中请注意,应以0.1dB为单位增加产生器的功率。由于NMEA-183协议所得到的卫星C/N值,是以最接近的小数字为准,因此在测量接收器C/N比值时,应估算噪声指数达1位数的精确度。范例结果如图18所示。
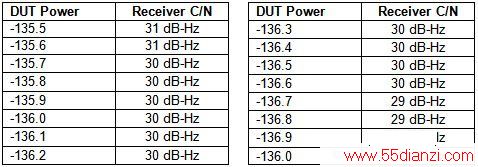
图18.DUT功率与接收器C/N的关联。
如图18所示,若RF功率强度处于-136.6dBm~-135.7dBm之间,则其C/N比值将维持于30dB-Hz.若以舍入法计算NMEA-183的数据时,则几乎可确定-136.1dBm功率强度将产生30.0dB-Hz的C/N比值无误。透过等式14,芯片组的噪声指数则为-174.0dBm+-136.1dBm+30.0dB-Hz=7.9dB.请注意,此计算是根据2组不确定性系数而进行:矢量信号发生器的功率不确定性,还有接收器所产生的C/N不确定性。
敏感度量测需要单一卫星激发,而有多项接收器量测需要可仿真多组卫星的单一测试激发。更进一步来说,如首次定位时间 (TTFF)、定位精确度,与精确度降低 (DILution of precision) 的量测作业,均需要接收器进行定位。由于接收器需要至少 4 组卫星进行 3D 定位作业,因此这些量测将较敏感度量测来得耗时。也因此,多项定位量测作业均于检验与校准作业中进行,而非生产测试时才执行。
此章节将说明可为接收器提供多组卫星讯号的方法。在讨论 GPS 仿真作业时,亦将让使用者了解 TTFF 与定位精确度量测的执行方法。若是讨论 RF 记录与播放作业,将一并说明应如何在多项环境条件下,校准接收器的效能。
首次定位时间 (TTFF) 与定位精确度量测,为设计 GPS 接收器的首要检验作业。若您已将多种消费性的 GPS 应用了然于胸,即应知道接收器回传其实际位置所需的时间,将大幅影响接收器的用途。此外,接收器回报其位置的精确度亦甚为重要。
为了让接收器可进行定位,则应透过导航讯息 (Navigation message) 下载星历与年历信息。由于接收器下载完整 GPS 框架必须耗费 30 秒,因此「冷启动 (Cold start)」的 TTFF 状态则需要 30 ~ 60 秒。事实上,多款接收器可指定数种 TTFF 状态。最常见的为:
冷启动 (Cold Start):接收器必须下载年历与星历信息,才能进行定位。由于必须从各组卫星下载至少 1 组 GPS 框架 (Frame),因此大多数的接收器在冷启动状态下,将于 30 ~ 60 秒时进行定位。
热启动 (Warm Start):接收器的年历信息尚未超过 1 个星期,且不需要其他星历信息。一般来说,此接收器可于 20 秒内得知目前时间,并可进行 100 公里内的定位 [2]。大多数热启动状态的 GPS 接收器,可于 60 秒内进行定位,有时甚至仅需更短的时间。
热开机 (Hot Start):接收器具备最新的年历与星历信息时,即为热开机状态。接收器仅需取得各组卫星的时序信息,即可开始回传定位位置。大多数热开机状态的 GPS 接收器,仅需 0.5 ~ 20 秒即可开始定位作业。
在大部分的情况下,TTFF 与定位精确度均与特定功率强度相关。值得注意的是,若能于多种情况下检验此 2 种规格的精确度,其实极具有其信息价值。因为 GPS 卫星每 12 个小时即绕行地球 1 圈,所以可用范围内的卫星讯号随时都在变化,也让接收器可在不同的状态下回传正确结果。
下列章节将说明应如何使用 2 笔数据源,以执行 TTFF 与定位精确度的量测,包含:
1) 接收器在其布署环境中,透过天线所获得的实时数据
上一页 [1] [2] [3] [4] [5] [6] [7] [8] 下一页






