一、系统体系结构
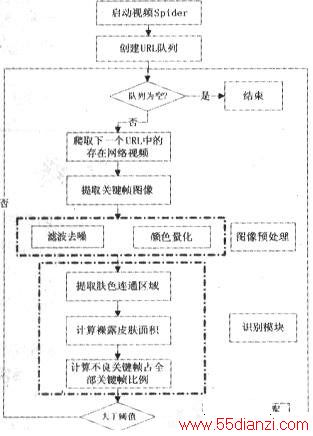
系统的整体工作过程如下图所示,本系统主要是针对互联网上的视频信息,因此首先需要利用网络视频Spider(爬虫程序)在网络上不断地获取包含有视频资源的网页,并创建URL队列。然后依次将URL对应页面中包含的视频资源抓取下来,提取视频中的关键帧图像,在对图像进行去噪和颜色量化等预处理后,计算每幅关键帧图像中裸露皮肤区域所占面积,以判断该关键帧是否为色情图像。最后,根据所有关键帧图像不良图像所占的比例来确定该视频是否为不良视频,并将不良视频对应的URL加入数据库中的黑名单中。
从图中可以看出,本系统主要包括视频爬虫、关键帧提取、图像处理、不良视频识别等模块,这几部分也是系统的核心组件,下面将分别介绍这些模块。
二、视频爬虫的设计
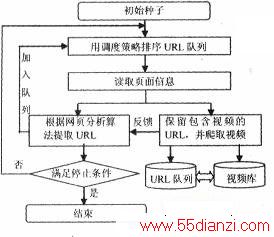
基于Intemet的网络爬虫程序从URL种子队列开始爬取,不断从当前页面抽取新的URL放入待爬行队列,直到满足系统设计的广度或深度策略的停止条件。
本系统主要使用网络爬虫来不断获取包含视频信息的网页,为了提高系统的效率,本模块可以采用多线程的方式工作,流程图如下图所示。
对于包含视频资源的网页,系统会将该URL追加到已创建的URL队列中,并将相对应的视频资源下载到视频库中,并利用已爬取的URL作为经验知识返回到网页中的URL提取过程中,以缩短系统判断URL是否包含视频资源的过程,这对提高系统的性能和工作效率是很有利的。
三、关键帧图像的提取与处理
视频数据是有一定的结构层次的,它由一系列的场景组成,一个场景又包含多个镜头,而一个镜头也是由多个图像帧组成的。一般来说,视频中同一镜头中的图像帧比较接近,特征信息基本不变。因此,通过发现相邻帧之间较剧烈的特征变化,就可以认为发生了镜头转换。
一个视频中会包含很多帧图像,而关键帧是整个视频数据中的最能反映视频内容的图像,可以作为判断视频性质的依据。为了分析视频是否包含色情等内容,一般需要提取视频中的关键帧,通过对关键帧图像的分析来判断视频是否为不良视频。在这个过程中,包括镜头分割、关键帧提取、图像预处理等步骤。
1.镜头分割
镜头作为视频数据的基本单元,可以分为突变镜头和渐变镜头两种类型。
下面对这两种情况分别进行分析。
(1)突变镜头分割本文中,利用图像的形状特征来检测突变镜头,首先使用sobel算子提取图像的边缘,在此基础上使用Hu矩描述图像形状特征。
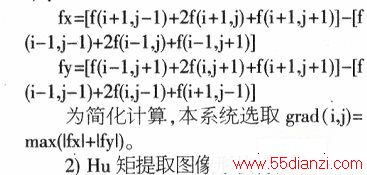
1)sobel算子提取图像边缘
sobel算子的基本思想是:以待增强图像的任意像素为中心,截取一个3x3的像素窗口。分别计算窗口中心像素在方向上的梯度。sobel算子的计算式如下:
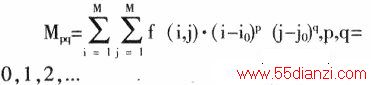
几何矩是由Hu (Visual pattemrecognition by moment invariants)在1962年提出的,其在图像像素数目一定时,具有对图像的旋转、平移和尺度变化的不变性。因此本系统在sobel算子提取边缘图的基础上,使用Hu矩提取图像形状特征。
对于一幅大小为MxN的二维图像{f(i,j)Ii=o…M.J=o…N},其(p+q)阶矩的数学表达式为:

式中,p,q可取所有的非负整数值,f(i.j)为soble算子提取的边缘图(二值图像)各像素点的值,取值限定为0或1。
其零阶矩的计算式为:

根据零阶矩和一阶矩可以得到,图像质心的计算式为:
![]()
那么,该图像的阶中心矩计算式为:
然后,对中心矩根据形状区域面积进行归一化,则得到不变矩满足尺度无关性特征。
利用上面的公式,计算图像的7个面积归一化中心矩[M11,m02,m20,m21,m12,m03,m30]。则Hu不变矩即为关于这7个矩的函数u[1]~u[7],且满足形状的旋转、平移和尺度变化的不变性[11]。
然后利用u[1]~u[7]构成图像的全局形状特征向量S=[Sk1k=1,2…,7]。
假设f(t)、f(1+1)分别为t和t+1时刻的图像帧,假设f(t)中存在但在f(t+1)消失的边缘像素个数为Nj,f(t+1)中新出现的边缘像素数为Nj,帧间差计算式为:
根据归一化的帧间差D可以检测出渐变变换的起止帧,从而对突变镜头进行分割。
(2)渐变镜头分割
对于渐变镜头,可以利用基于隔帧帧间差的算法进行分割,这种方法主要是通过若干帧的累计,在一定程度上扩大帧间差,从而检测出渐变变换的起止帧。计算式如下:
![]()
其中,IF(t+n)-F(t)l表示帧间的距离差,n表示相隔的帧数。
2.关键帧提取
为了简化计算,在系统完成镜头检测与分割后,对于渐变的镜头,提取与起始帧距离最大的帧作为该镜头的关键帧;对于普通镜头,提取最中间的一帧作为关键帧。此时,可以得到与镜头数量相等的关键帧序列,再对该序列进行K均值聚类,压缩到由10—15帧图像组成的关键帧序列。
3.关键帧预处理
在关键帧中可能会存在一些噪音点,这些噪音在一定程度上影响了图像的质量,使图像变得模糊、甚至影响图像特征的分析。对于含有噪音的图像一般需要对图像进行平滑处理,这样可以减少或消除图像中的噪音,以提高后面的区域生长算法分割图像的效果。
本文中使用矢量中值滤波算法对原始图像进行滤波处理,该算法首先在滤波窗口中选择一个与其他像素矢量距离最小的一个像素,然后以此像素取代滤波窗口的中心像素,对图像进行平滑处理。由于一副彩色图像往往包含成千上万种不同的颜色,所以需要对原始图像进行颜色量化,就是将图像中的多种颜色根据人的视觉效果归类为较少的颜色,以减少计算置。本文首先分别利用多种量化算法对图像进行量化处理,然后对这些算法的量化结果进行比较,从中选择一种效果最好的算法。
评价彩色图像颜色量化结果的两个主要指标是时间复杂度和图像失真度。
而失真度指标反映了彩色图像质量的变化,是评价颜色量化算法好坏最主要的指标,其定义如下:
间中原始彩色图像与量化处理后图像中第i点处相对应的亮度和色度差。
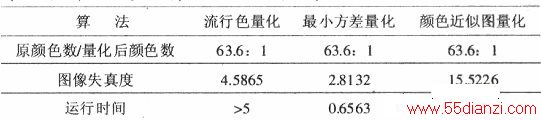
下表是同一幅原始彩色遥感图像经过不同颜色量化算法的处理结果。
上一篇:音视美M3200中控器写码流程






