DF100A型PSM短波发射机的自动控制系统,可以较好实现发射机自动化控制、调谐、监测、报警等功能,对发射机稳定运行和简化操作程序起到了积极作用。此机有各种类型的继电器、接触器,检修测试所要求的线包额定电压也不相同,因此8路马达组件的检修工作复杂繁重,为了方便、快捷地完成马达组件的检修测试工作,制作出一款综合测试平台。
一、制作要达到的设计目标
1.实现各种交流继电器的检修测试工作;
2.实现各种直流继电器的检修测试工作:
3.完全模拟设备工作原理测试检修完毕后的马达组件,使马达组件随调谐电位器任意可靠转动。
二、设计原理
电路原理见下图。
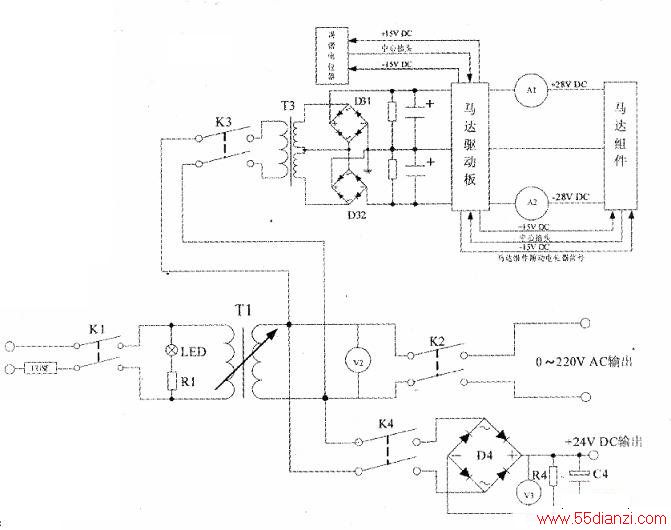
图中,K1为电源总开关,输入两相电源220V,其中一相电路接有SA保险。LED为电源指示灯,R1为100kΩ/10W降压电阻。T1为可调变压器,最大变比为1:1。因此,空开K2输出端最大输出电压为交流220V,V2为交流输出端电压指示表。当空开K4合闸时D4整流输出0~24V DC电压以满足各种直流继电器的检修测试,V3为输出直流电压指示表,R4为lOn/2W负载电阻,C4为50V/1000μF滤波电容,3为双次级输出变压器,单独输出电压均为30V交流电压:D31和D32为串联组合整流桥,单独整流输出直流28V,串联组合输出电压为直流52V,组合t},心点电压28VDC。
工作原理:由于马达驱动板需要正负28V DC电压供电,所以D31和D32串联组合中心点与马达驱动板接地点连接,使马达驱动板地电位抬升为28VDC。组合整流桥正极输出端与马达驱动板+28V端子连接;组合整流桥负极输出端与马达驱动板-28V DC端子连接。
A1、A2为正负28V DC电流指示表,用于检测马达组件启动时和正常运转时的电流指示。调谐电位器和马达组件随动电位器正负15VDC均有马达驱动板提供,用于检测马达组件的随动运转能力。
三、马达驱动板控制电路分析
马达驱动板控制电路见下图。
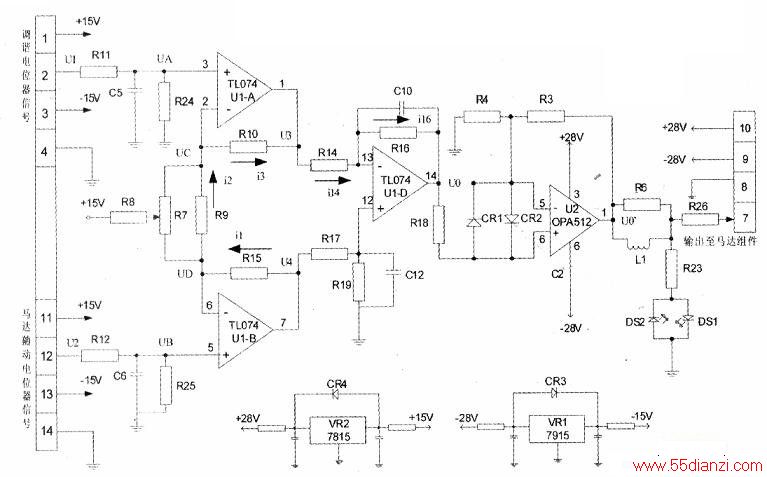
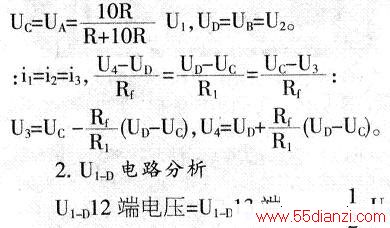
1.U1-A和U1-B计算分析
图中,U1-A、UA-B和UA-D为集成运算放大器,R10=R15=Rf,R9=R1,R11=R12=R14=R16=R17=R19=R,R24=R25=10R12=10R11=10R。
由运算放大器“虚短”特性可得:
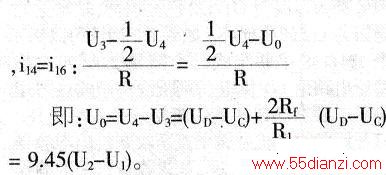
3.U2(OPA512)电路分析R3=R2=18kΩ,R4=R1=0.475kΩ。
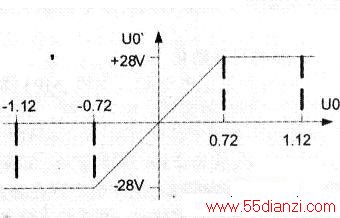
设Uo’=+28V,则U_=Uo’=0.72V,而CR1、CR2导通压降为0.4V,故当Uo>0.4+0.72V=1.12V时,CR1才能导通,CR1导通使U+>U-,可知此时OPA512构成电压比较器,故可保证Uo'=+28V。
当O<Uo<1:12V时,CR1、CR2’均截止,此时OPA512构成比例放大器。根据“虚断”概念,Uo’=(1+)Uo=38.9Uo,但0.72V<U0<1.12V日寸,有Uo’=38.9Uo>+28V,但由于电源电压为+28V,故Uo’=+28Vo当Uo’=-28V时,分析同上。
4.Uo’输出波形如下图所示。因为马达转动存在惯性,不能由正转方向立即变为反转方向或立即停止,采用类似刹车方式的电路,在调谐、随动电位器位置超出范围较大的时候,Uo’=-28V或Uo'=+28V使马达高速转动,当超出范围较小时Uo’的绝对值将减小,使马达转速逐渐降低以达到精准控制。
5.集成块VR1(7915)、VR2(7815)将正负28V电压变为正负15V电压以满足调谐、随动电位器控制信号所需。
R7为可调电位器,当调谐电位器信号2与马达组件电位器信号12端短路,调整R7使输出至马达组件7端的输出电压为零电位,即初始调零。DS1、DS2为正转和反转指示灯,用于指示马达组件此时的转动状态。
四、设计特点
变压器T1应有足够容量满足各绕组同时输出的需求,并可根据实际需要调整输出电压。各种输出电压由K2、K3、K4空开分别控制。特别是模拟设备控制电路设计出的马达检修测试电路方便可靠,实用性较强。
本文关键字:广电设备 仪器仪表读写器,电子知识资料 - 仪器仪表读写器






