void PFCSOFtStartRoutine()
{
Delay_ms(STARTUP_DELAY)
pfcVoltagePID.controlReference = pfcInitialOutputVoltage;
while (pfcVoltagePID.controlReference <= PFCVOLTAGE_REFERENCE)
{
Delay_ms(SOFTSTART_INCREMENT_DELAY);
pfcVoltagePID.controlReference += PFC_SOFTSTART_INCREMENT;
}
pfcVoltagePID.controlReference = PFCVOLTAGE_REFERENCE;
}
在例1 中,DSPIC DSC 初始化之后就立刻调用软启动子程序。首先调用启动延时,随后输出电压参考将被设定为实际测量的输出电压。参考值一直以固定速率上升,直到其达到期望值为止。此时,软启动结束,系统正常运行开始。数字控制器可灵活使用软启动子程序。相同的子程序在不同时间阶段可通过不同参数进行调用。例如,如果系统要在故障发生后重启,启动延时和软启动持续时间可修改为不同的值。
时序控制可在不外加任何电路的情况下,通过一些灵活的配置加以实现。图6 中显示了一些时序机制原理图。
如果一个转换器取决于另一级的输出,则软件可设置标志来指示转换器何时完全启动,电压已经为下一级的上升作好准备。
如图6 所示,数字电源能根据实际应用需求以多种方式轻松实现时序控制。数字电源在选择软启动和时序控制方案上具有很大的灵活性,不需要增加专用芯片或者复杂的电路。
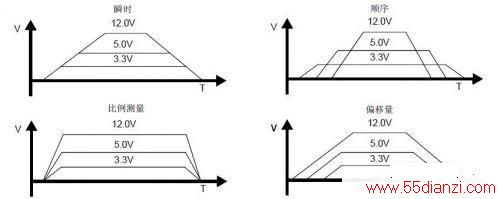
图 6: 时序控制机制






