摘要:针对工业锅炉自动控制系统中的水箱系统液位控制问题,提出基于模糊控制器的基础上,设计实现一种双模糊控制器。根据输出信号的误差大小分别利用两个模糊控制器进行控制,控制结果传递给调节器,以实现水箱水位不变。从仿真结果来看,双模糊控制器有效地减小了系统稳态误差,响应时间、超调量、稳定时间等性能优于传统的PID控制。
关键词:双模糊控制器;水箱;液位控制;调节器
引言
对于典型工业系统的控制,很多专家和学者都应用模糊控制实现了对复杂系统的设计和仿真,如曾鸣等人应用双模糊控制器实现对车辆半主动悬架控制;周妮娜应用于模糊控制器实现对锅炉除氧系统的控制;张松兰等人设计了锅炉汽包水位模糊自适应控制策略等。本文针对工业锅炉中的水箱液位控制,设计了一种双模糊控制器,实现对系统的无误差控制。
1 双模糊控制器原理
单模糊控制器主要用于快速响应及对大误差的消除,在单模糊控制器中,若使误差量化因子KE增大,相当于缩小了误差的基本论域,增大了对误差变量的控制作用。同时,将误差变化率因子KEC增大,可减小超量;将控制量的比例因子KU减小,可减小系统振荡。
双模糊控制器原理图如图1所示。假设变量eo为大、小误差的临界值(人为可以根据实际设定),当系统误差较大时,用单模糊控制器(1)进行控制,以达到快速响应及消除误差的目的;当系统的误差较小时,用单模糊控制器2进行控制,以改善模糊控制器对于系统误差较小时的控制效果,进而帮助取得较好的控制效果。

2 锅炉液位控制系统的双模糊控制设计
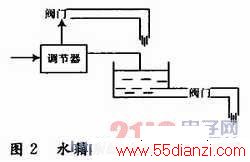
锅炉液位控制系统的原理简图如图2所示。入口处的阀门由一个调节器控制,以保持水位的不变,出口处的阀门由外部操纵。
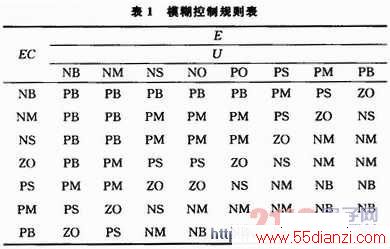
使用的推理方法是最大最小推理法。最终推理结果是以模糊子集的形式来表示系统输出量阀门的校正量。
www.55dianzi.com
3 仿真结果及分析
利用Matlab的Simulink进行仿真,建立该系统的双模糊控制器仿真结构图如图3所示,仿真示意图如图4所示。

/2011.03/12/e.JPG)
仿真结果如图5所示。
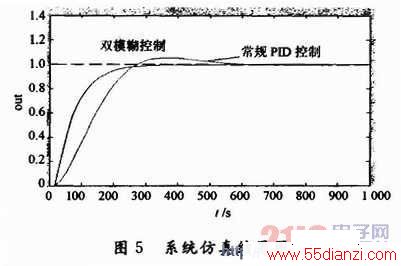
从结果对照图来看系统响应时间的对比,即:双模糊控制响应时间短,只需不到300 s即可使系统到达稳态,常规PID控制响应时间长,大约需要600 s。常规PID控制存在明显的超调,双模糊控制则没有超调,双模糊控制器在稳态时消除了系统稳态误差。
4 结语
本文设计实现了一种双模糊控制器,利用双模糊控制器完成了对系统的仿真。仿真结果显示,双模糊控制器的上升时间短,响应速度快,稳态精度高。从实验来看,双模糊控制器可以改善系统的控制精度和稳定性能。若将该理论应用于实际工程,无疑具有很好的应用价值。
本文关键字:控制器 位置-距离控制电路,电器控制 - 位置-距离控制电路






